راهنمای جامع تشخیص لبه در بینایی ماشین

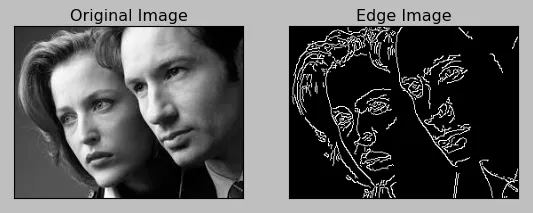
تشخیص لبه در بینایی ماشین پایهایترین تکنیک است که با هدف شناسایی نقاطی در تصویر انجام میشود که در آنها تغییرات شدیدی در شدت روشنایی رخ میدهد. این «لبهها» اغلب به مرزهای اشیاء، تغییرات بافت…
تشخیص لبه در بینایی ماشین پایهایترین تکنیک است که با هدف شناسایی نقاطی در تصویر انجام میشود که در آنها تغییرات شدیدی در شدت روشنایی رخ میدهد. این «لبهها» اغلب به مرزهای اشیاء، تغییرات بافت و جزئیات ساختاری مهمی اشاره دارند که برای وظایف سطح بالاتر بینایی مانند تقسیمبندی، شناسایی و دنبالکردن حیاتی هستند. بهعنوان یکی از نخستین و پرمطالعهترین مسائل در پردازش تصویر، تشخیص لبه از فیلترهای ساده مبتنی بر گرادیان تا الگوریتمهای پیچیده چندمرحلهای و اخیراً روشهای دادهمحور مبتنی بر یادگیری عمیق تکامل یافته است. در این پست، به بررسی مبانی نظری، روشهای کلاسیک، بهبودها و استراتژیهای مدرن مبتنی بر یادگیری ماشین برای تشخیص لبه میپردازیم و همچنین ملاحظات عملی و کاربردها را مرور خواهیم کرد.
۱. مبانی نظری
۱.۱ لبه چیست؟
لبه را میتوان بهطور شهودی بهعنوان یک تغییر محلی قابلتوجه در شدت تصویر تعریف کرد. بهصورت رسمی، در یک تصویر پیوستهٔ خاکستری ، لبهها متناظر با مکانهایی هستند که اندازهٔ گرادیان
بزرگ باشد. لبهها ممکن است انواع زیر باشند:
-
لبهٔ گسسته (Step Edge): جایی که تغییر شدت ناگهانی است (مثلاً مرز اشیاء).
-
لبهٔ شیبدار (Ramp Edge): جایی که انتقالها بهدلیل تاری یا نویز تدریجی هستند.
-
لبهٔ سقفی (Roof Edge): لبههای دوتایی که از انتقال تاریک→روشن→تاریک ایجاد میشوند.
هدف تشخیص لبه یافتن این نقاط شدت گرادیان بالا است، درحالیکه تأثیر نویز و بافتهای سطحی ملایم را کاهش میدهد.
۱.۲ نویز و پیشپردازش
تصاویر واقعی همیشه حاوی نویز هستند—از نویز حسگر تا عوامل محیطی. چون مشتقگیری (differentiation) نویز را تشدید میکند، اغلب الگوریتمهای تشخیص لبه با صافسازی تصویر آغاز میشوند:
-
صافسازی گوسی: همنهشتی تصویر با یک هستهٔ گوسی نویز فرکانس بالا را کاهش میدهد و ساختارهای بزرگتر را حفظ میکند. پارامتر تعادلی بین حساسیت به جزئیات ریز و سرکوب نویز ایجاد میکند.
-
فیلترهای تطبیقی: روشهای پیشرفتهتر مانند فیلتر دوطرفه (bilateral) یا پراکندگی ناهمسانگرد (anisotropic diffusion) نویز را کاهش میدهند درحالیکه لبههای مهم را حفظ میکنند.
۲. روشهای کلاسیک مبتنی بر گرادیان
۲.۱ اپراتور رابرتز (Roberts Cross)
از اولین تقریبهای گسستهٔ گرادیان است. این روش دو هستهٔ را بکار میبرد:
این هستهها اختلافات قطری را محاسبه میکنند و لبههایی بسیار نویزی تولید میکنند. بهدلیل کوچکبودن دامنه و عدم صافسازی کافی، امروزه بهندرت بهتنهایی استفاده میشود.
۲.۲ اپراتورهای پرویت (Prewitt) و سوبل (Sobel)
اپراتور پرویت گرادیان را با هستههای تقریب میزند:
اپراتور سوبل با وزندهی بیشتر به سطر/ستون مرکزی، تمرکز بر پیکسل میانی را افزایش میدهد:
پس از محاسبه گرادیانهای ، شدت و جهت گرادیان در هر پیکسل چنین محاسبه میشود:
این روشها ساده و سریعاند اما به نویز حساس بوده و اغلب لبههای واقعی را از بافتهای ریز تمیز نمیدهند.
۳. الگوریتم کنی (Canny)
الگوریتم کنی که توسط جان کنی در سال ۱۹۸۶ معرفی شد، هنوز استاندارد طلایی بسیاری از کاربردهاست. این الگوریتم سه معیار را بهینه میکند:
-
تشخیص خوب: کمینهسازی لبههای از دست رفته و لبههای کاذب.
-
مکانیابی دقیق: لبههای کشفشده باید در نزدیکی لبههای واقعی باشند.
-
پاسخ یکتا: هر لبه تنها یک بار شناسایی شود (لبههای ضخیم حذف شوند).
فرآیند چندمرحلهای کنی:
-
صافسازی گوسی: همنهشتی تصویر با برای کاهش نویز.
-
محاسبه گرادیان: استفاده از هستههای مشتقگوسی برای بهدستآوردن و .
-
کاهش غیرماکزیمم (Non-maximum Suppression): نازککردن لبهها با نگهداشتن فقط پیکسلهایی که در امتداد جهت گرادیان بیشینهٔ موضعی هستند.
-
دو آستانهگذاری (Double Threshold): طبقهبندی پیکسلها به قوی، ضعیف یا غیرلبه با دو آستانه و .
-
ردیابی لبه با هیسترزیس (Edge Tracking by Hysteresis): پیوند پیکسلهای ضعیف به قوی در صورت وجود پیوستگی و حذف پاسخهای ضعیف جداافتاده.
۳.۱ انتخاب پارامترها
-
گوسی: هرچه بزرگتر باشد، نویز بیشتر از بین میرود اما لبههای ریز ممکن است محو شوند.
-
آستانهها: معمولاً تنظیم میشود.
تعادل بهینهٔ کنی بین تشخیص و مکانیابی، آن را در رباتیک، تصویربرداری پزشکی و بازرسی صنعتی محبوب کرده است.
۴. روشهای صفر-عبور و لاپلاس
۴.۱ لاپلاس گوسی (LoG)
اپراتور لاپلاس مشتق دوم است که به تغییرات هر دو قطبیتی واکنش نشان میدهد. روش LoG ابتدا با گوسی صاف میکند و سپس لاپلاس میگیرد:
لبهها با یافتن نقاط صفر-عبور در پاسخ LoG و اعمال آستانهگذاری بر دامنهٔ پاسخ تشخیص داده میشوند.
۴.۲ اختلاف گوسیها (DoG)
DoG با تفریق دو تصویر گوسیشده با مقیاسهای و تقریب ارزانقیمتتری از LoG است:
DoG پایهای برای الگوریتمهایی مانند SIFT است که ویژگیها را در چندمقیاس شناسایی میکند.
۵. تشخیص لبه با روشهای مرفولوژیک
ریاضیات مرفولوژی با گسترش (dilation) و فرسایش (erosion) روشهای جایگزینی ارائه میدهد:
که ساختارعنصر (structuring element) است. گرادیان مرفولوژیک انتقالهای شدت را برجسته میکند.
روشهای مرفولوژیک در تحلیل شکل و مقاومت در برابر نویزهای خاص با ساختارعنصر تطبیقی عملکرد خوبی دارند.
۶. روشهای چندمقیاس و مبتنی بر موجک
تصاویر واقعی ساختارهایی در مقیاسهای مختلف دارند. تشخیص لبه در چندمقیاس به بررسی گرادیانها در سطوح مختلف صافشدگی میپردازد:
-
نمایش فضای مقیاس (Scale-space): ساخت هرم تصاویر گوسیشده و تشخیص لبه در هر سطح.
-
تبدیل موجک: تجزیه تصویر به زیرباندهای فرکانسی؛ لبهها بهصورت ضرایب بزرگ در مقیاسهای مختلف ظاهر میشوند. موجکهای Haar یا Daubechies برای نقشههای لبه کارآمد چندرزولوشن بهکار میروند.
روشهای چندمقیاس با ترکیب پاسخها میتوانند جزئیات ریز و درشت را همزمان شناسایی کنند و در برابر نویز و بافت مقاومتر شوند.
۷. تشخیص لبه مبتنی بر یادگیری
۷.۱ روشهای دادهمحور اولیه
قبل از تسلط یادگیری عمیق، روشهای دادهمحور با یادگیری فیلتر از نقشههای لبه برچسبخورده کار میکردند:
-
Pb (Probability of Boundary): ویژگیهای محلی (نور، رنگ، بافت) را محاسبه و با رگرسیون لجستیک ترکیب میکند تا احتمال لبه را پیشبینی کند.
-
Structured Edge Detector (SE): جنگلهای تصادفی را روی تکههای تصویر آموزش میدهد تا خروجیهای ساختاریافته (ماسک لبه) تولید کند.
اگرچه از فیلترهای دستی بهتر بودند، اما به مدلهای کمعمق محدود میماندند.
۷.۲ روشهای یادگیری عمیق
ظهور شبکههای کانولوشنی (CNN) انقلاب بزرگی در تشخیص لبه ایجاد کرد:
-
HED (Holistically-Nested Edge Detection): در شبکهای شبیه VGG، چندین خروجی جانبی در عمقهای مختلف اضافه میکند که هرکدام با لبههای مرجع آموزش میبینند و در نهایت پاسخها را ادغام میکند.
-
RCF (Richer Convolutional Features): با نظارت در هر لایه کانولوشن، نمایندگی غنیتری ارائه میدهد.
-
CED (Convolutional Encoder-Decoder): معماریهای رمزگذار-رمزگشا (مانند U-Net) با اتصالهای پرشی (skip connections) جزئیات با وضوح بالا را بازسازی میکنند.
۷.۲.۱ آموزش و مجموعهدادهها
-
BSDS500: مجموعهدادهای از تصاویر طبیعی با لبههای برچسبخورده انسانی؛ معیار اصلی ارزیابی.
-
NYUDv2: صحنههای داخلی با اطلاعات عمق؛ امکان آموزش بر روی دادههای RGB-D.
-
یادگیری چندوظیفهای: برخی چارچوبها همزمان لبه، تقسیمبندی معنایی، نرمالهای سطح یا عمق را یاد میگیرند و با اشتراک ویژگیها دقت را افزایش میدهند.
مدلهای عمیق به دقت بالا دست مییابند اما به داده و توان پردازشی زیادی نیاز دارند و ممکن است در مواجهه با ظاهر ناآشنا دچار خطا شوند.
۸. ملاحظات عملی
۸.۱ عملکرد و پیچیدگی
-
فیلترهای کلاسیک سریع و سبکاند؛ مناسب کاربردهای زمان-واقعی یا توکار اما به نویز حساس.
-
کنی در زمان اجرا میشود اما به تنظیم دقیق پارامترها نیاز دارد.
-
مدلهای عمیق کیفیت بالاتری ارائه میدهند اما به تأخیر، حافظه و GPU نیاز دارند.
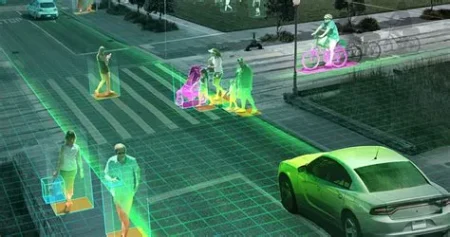
در کاربردهای خودران، ممکن است فیلتر سبک را روی همهٔ فریمها اجرا کنند و مدل عمیق را با نرخ کمتر فراخوانی کنند.
۸.۲ انتخاب پارامتر
-
مقیاس فیلتر (): برای تصاویر نویزی بزرگتر، برای جزئیات ریز کوچکتر.
-
آستانهها: روشهایی مانند آستانهگذاری اوتسو (Otsu) یا درصدهای هیستوگرام گرادیان میتواند کالیبراسیون را خودکار کند.
-
سایز ساختارعنصر: در روشهای مرفولوژیک، با توجه به عرض مورد انتظار اشیاء انتخاب میشود.
جستجوی خودکار پارامتر (جستجوی شبکهای یا بهینهسازی بیزی) در خطوط تولید مفید است.
۸.۳ پسپردازش
نقشههای لبه معمولاً اصلاح میشوند:
-
پیوند لبه و استخراج کانتور: اتصال پیکسلهای لبه به منحنیهای پیوسته؛ روشهایی مانند تبدیل هاف (Hough) خطها یا دایرهها را شناسایی میکنند.
-
حذف قطعات کوچک: حذف خوشههای جداافتاده زیر یک آستانهٔ اندازه.
-
نازککردن زیرپیکسلی: با میانیابی یا مدلهای فعال (snakes) دقت را افزایش میدهد.
این مراحل لبهها را برای وظایفی مانند برداریسازی، شناسایی اشیاء یا ثبت تصویر آماده میکند.
۹. کاربردها
۹.۱ شناسایی و طبقهبندی اشیاء
لبهها سرنخهای شکلی مهمی فراهم میکنند. توضیفگرهایی مانند SIFT یا تجمیع جهتگرادیانها بر پایه لبهها کار میکنند. ترکیب نقشهی لبه با آشکارسازهای یادگرفتهشده باعث مقاومت بیشتر در برابر پسزمینههای شلوغ میشود.
۹.۲ تقسیمبندی تصویر
تشخیص مرز نخستین گام در تقسیمبندی مبتنی بر ناحیه است:
-
تبدیل واترشد (Watershed): از شدت لبه بهعنوان سد برای «سیلاب» بخشها استفاده میکند.
-
روشهای گراف: پیکسلها را گره و وزنها را بر اساس احتمال لبه تنظیم میکنند؛ با روشهایی مانند min-cut یا خوشهبندی طیفی تقسیم میکنند.
لبههای دقیق باعث مرزهای مشخص در تقسیمبندی میشود؛ بهویژه در تصویربرداری پزشکی برای جداسازی اندام یا تومورها.
۹.۳ حرکت و دنبالکردن
در ویدئو، لبهها کاربردهای زیر را دارند:
-
جریان نوری (Optical Flow): گرادیانها ورودی روشهایی مانند Lucas–Kanade یا Horn–Schunck برای محاسبه حرکت پیکسلها هستند.
-
دنبالکردن ویژگی: ویژگیهای مبتنی بر لبه (گوشهها، پیوندها) نسبت به بافتهای صرف قابلاعتمادتر دنبال میشوند.
لبهها در برابر تغییرات روشنایی مقاومتر هستند.
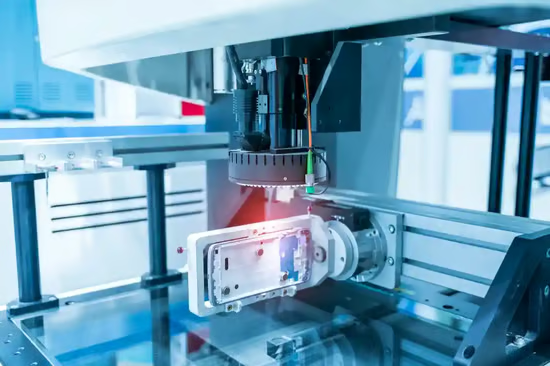
۹.۴ بازرسی صنعتی
سیستمهای تولید برای بررسی هندسه قطعات از تشخیص لبه استفاده میکنند:
-
اندازهگیری پروفیل: یافتن لبهها در مقاطع برای دقت ابعادی.
-
تشخیص عیب: شناسایی ترک یا خراش بهعنوان قطعیت در لبههای سطح.
-
تراز و ثبت: همترازی دوربین با قالب مرجع از طریق تطابق الگوهای لبه.
روشهای کلاسیک بهدلیل پیشبینیپذیری و قابلیت توضیح همچنان محبوباند.
۹.۵ تصویربرداری پزشکی
لبهها ساختارهای آناتومیک را در تصاویر رادیوگرافی، MRI و سونوگرافی مشخص میکنند. تکنیکهای پیشرفته ترکیبی از روشهای گرادیانمحور با برازش مدل برای تقسیمبندی رگها، استخوانها یا ضایعات استفاده میکنند. حفظ لبه در هنگام حذف نویز (مانند پراکندگی ناهمسانگرد) در مدالیتههای کمکنتراست حیاتی است.
۱۰. گرایشهای نوظهور
۱۰.۱ فیلترهای یادگرفتهشده و مکانیزمهای توجه
بهجای طراحی دستی فیلتر لبه، معماریهای عصبی اکنون هستههای تفاضلی یادگرفتهشده و ماژولهای توجه را وارد میکنند که بهطور دینامیک روی مرزهای برجسته تمرکز میکنند. این فیلتر تطبیقی بافتهای پیچیده و نورپردازی متغیر را بهتر مدیریت میکند.
۱۰.۲ گرافنورالنتها برای مرزها
با مدلسازی روابط پیکسلی بهصورت گراف، GNNها میتوانند زمینهٔ کلی را برای پیشبینی لبه در نظر بگیرند و پیوستگی را در فواصل طولانی بهبود دهند—مفید در تصاوی��های ماهوارهای و سنجش از دور.
۱۰.۳ یادگیری ناظرنشده و خودناظر
جمعآوری دادههای برچسبخوردهٔ لبه پرهزینه است. کارهای اخیر به بررسی موارد زیر میپردازند:
-
نشانههای خودناظر: استفاده از تبدیلهای تصویری (مانند جابجایی پچها، درونیابی) برای تولید برچسبهای مصنوعی لبه.
-
یادگیری تضادی: تشویق نمایش ویژگیها برای تمایز پچهای لبه از غیرلبه بدون برچسب صریح.
این روشها نویددهندهٔ تشخیص لبه مقاوم با حداقل حاشیهنویسی هستند.
۱۱. نتیجهگیری
تشخیص لبه، علیرغم پیشینه طولانی، همچنان حوزهای فعال در پژوهش و یک بلوک ساختمانی کلیدی در بینایی ماشین است. از فیلترهای سادهٔ گرادیان تا زنجیره بهینهٔ کنی و چارچوبهای یادگیری عمیق مدرن، این حوزه همواره برای مواجهه با نویز، مقیاس و پیچیدگی معنایی تکامل یافته است. کارشناسان باید بین سرعت، دقت و محدودیتهای منابع تعادل برقرار کنند و روش مناسب را برای کاربرد خود—چه رباتیک زمان-واقعی، تشخیص پزشکی یا بازرسی صنعتی—انتخاب نمایند. با بلوغ بیشتر روشهای یادگیریمحور و پیشرفت شیوههای ناظرنشده، انتظار میرود تشخیص لبه سازگارتر، قابلاطمینانتر و یکپارچهتر در سیستمهای چشمانداز انتها-به-انتهای آینده گردد.
منابع پیشنهادی برای مطالعهٔ بیشتر
-
John F. Canny, “A Computational Approach to Edge Detection,” IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986.
-
Piotr Dollár and C. Zitnick, “Structured Forests for Fast Edge Detection,” ICCV, 2013.
-
S. Xie and Z. Tu, “Holistically-Nested Edge Detection,” ICCV, 2015.
-
R. Achanta et al., “Normalised Cuts and Image Segmentation,” CVPR, 2000.
-
T. Lindeberg, “Scale-space theory in computer vision,” International Journal of Computer Vision, 1994.
پرسشهای متداول (FAQs)
1 تشخیص لبه چیست؟
تشخیص لبه فرآیندی برای یافتن نقاطی در تصویر است که در آنها تغییر قابلتوجهی در شدت پیکسل رخ میدهد.
2 چرا تشخیص لبه مهم است؟
لبهها اطلاعات ساختاری و مرزهای اشیاء را مشخص میکنند و برای وظایف بالاتر مانند شناسایی و تقسیمبندی ضروریاند.
3 تفاوت لبهی گسسته و لبهی شیبدار چیست؟
لبهٔ گسسته ناگهانی است، اما لبهٔ شیبدار بهدلیل تاری یا نویز بهصورت تدریجی رخ میدهد.
4 نقش صافسازی گوسی در تشخیص لبه چیست؟
صافسازی گوسی نویز را کاهش میدهد تا مشتقگیری گرادیان لبهها کمتر تحت تأثیر نویز قرار گیرد.
5 چگونه اپراتور سوبل گرادیان را محاسبه میکند؟
سوبل با استفاده از هستههای ۳×۳ با وزندهی مرکزی، گرادیانهای افقی و عمودی را استخراج میکند.
6 چرا از کاهش غیرماکزیمم (NMS) استفاده میشود؟
NMS باعث نازک شدن لبهها میشود و تنها قویترین پاسخ در امتداد جهت گرادیان باقی میماند.
7 مراحل اصلی الگوریتم کنی چیست؟
صافسازی گوسی، محاسبه گرادیان، کاهش غیرماکزیمم، دو آستانهگذاری و ردیابی هیسترزیس از مراحل الگوریتم کنی هستند.
8 چگونه آستانههای کنی را تنظیم کنیم؟
معمولاً از نسبت \(T_\text{low}=0.4\,T_\text{high}\) استفاده و با توجه به نویز و جزئیات تصویر تنظیم میشوند.
9 روش Laplacian of Gaussian چیست؟
ابتدا تصویر را با گوسی صاف میکند و سپس مشتق دوم لاپلاس را اعمال میکند تا صفر-عبورها را بیابد.
10 تفاوت DoG با LoG چیست؟
DoG با تفریق دو تصویر گوسیشده تقریب کمهزینهتری از LoG ارائه میدهد و برای چندمقیاس استفاده میشود.
11 مزایای روشهای مرفولوژیک در تشخیص لبه چیست؟
روشهای مرفولوژیک قابلیت تنظیم ساختارعنصر و مقاومت در برابر نویزهای خاص را فراهم میکنند.
12 چگونه موجکها لبهها را آشکار میکنند؟
موجکها تصویر را به زیرباندهای فرکانسی تجزیه میکنند و لبهها بهصورت ضرایب بزرگ در چند مقیاس ظاهر میشوند.
13 چرا از روشهای یادگیری عمیق برای تشخیص لبه استفاده میکنیم؟
مدلهای عمیق نمایندگیهای پیچیدهتری یاد میگیرند و در حضور بافتها و شرایط نوری متغیر عملکرد بهتری دارند.
14 HED چگونه عملکرد میکند؟
HED با نظارت جانبی در لایههای مختلف شبکه CNN خروجیهای چندمقیاس تولید و سپس آنها را ادغام میکند.
15 بهترین مجموعهداده برای ارزیابی کدام است؟
BSDS500 برای تصاویر طبیعی و NYUDv2 برای تصاویر RGB-D از جمله مجموعهدادههای استاندارد هستند.
16 چگونه پارامترها را خودکار تنظیم کنیم؟
با روشهایی مانند آستانهگذاری اوتسو یا بهینهسازی شبکهای و بیزی میتوان پارامترها را بهصورت خودکار یافت.
17 پسپردازش لبهها شامل چه مراحلی است؟
اتصال کانتورها، حذف قطعات کوچک و نازکسازی زیرپیکسلی از مهمترین مراحل پسپردازش هستند.
18 کاربردهای صنعتی تشخیص لبه چیست؟
اندازهگیری پروفیل، تشخیص ترک و تراز قطعات در خطوط تولید از کاربردهای رایج صنعتی هستند.
19 روندهای نوظهور در تشخیص لبه چه هستند؟
استفاده از مکانیسمهای توجه، گرافنورالنتها و یادگیری خودنظارتی از روندهای نوظهور در این حوزهاند.





