راهنمای جامع پردازش تصویر حرارتی (Thermal Image Processing)

پردازش تصویر حرارتی به عنوان یکی از شاخههای مهم بینایی ماشین و تحلیل تصویر امروزه در حوزههای متنوعی مانند پزشکی، صنعت، امنیت و کشاورزی کاربردهای فراوانی یافته است. این مقاله بهطور جامع به مبانی، تکنیکها،…
پردازش تصویر حرارتی به عنوان یکی از شاخههای مهم بینایی ماشین و تحلیل تصویر امروزه در حوزههای متنوعی مانند پزشکی، صنعت، امنیت و کشاورزی کاربردهای فراوانی یافته است. این مقاله بهطور جامع به مبانی، تکنیکها، چالشها و کاربردهای پردازش تصاویر حرارتی میپردازد. در پایان، چشماندازی از روندهای آینده و فرصتهای تحقیقاتی نیز ارائه میشود
مقدمه
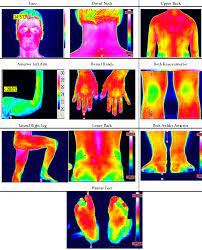
در سالهای اخیر، پردازش تصویر حرارتی به دلیل امکان ردیابی و تحلیل دقیق نقشه دمایی اجسام بدون تماس مستقیم توجه بسیاری از محققان و مهندسان را به خود جلب کرده است. برخلاف دوربینهای معمولی که براساس نور مرئی تصویر میسازند، دوربینهای حرارتی تابش مادونقرمز ساطعشده از سطح اجسام را ثبت میکنند و با تبدیل آن به تصویر، تفاوتهای دمایی را در قالب شدت نور به ما نشان میدهند.
این توانایی منحصربهفرد باعث شده تا کاربردهای این فناوری در حوزههای گوناگونی گسترش یابد. از تشخیص سریع گرفتگی عروق در پزشکی گرفته تا نظارت بر فرآیندهای صنعتی حرارتی و بازرسی خطوط انتقال انرژی، همه و همه بدون تماس فیزیکی امکانپذیر شده است. در ادامه، ابتدا به مبانی فیزیکی تشکیل تصویر حرارتی میپردازیم، سپس مراحل اصلی پردازش را بررسی میکنیم و در نهایت به کاربردها، چالشها و چشمانداز آینده خواهیم پرداخت.
اصول و مبانی تصویر حرارتی
تابش حرارتی و قانون پلانک
تمام اجسام با دمای بالاتر از صفر مطلق (-273.15 °C) تابش الکترومغناطیسی تولید میکنند. این تابش در طیف مادونقرمز قرار دارد. قانون پلانک در فیزیک تابشهای جسم سیاه (Blackbody) را تعریف میکند:
I(λ, T) = (2hc² / λ⁵) * (1 / (e^(hc / (λkT)) – 1))
که در آن:
- I(λ, T): چگالی طیفی تابش در طول موج λ و دما T
- h: ثابت پلانک
- c: سرعت نور
- k: ثابت بولتزمن
- T: دمای جسم (بر حسب کلوین)
با اندازهگیری شدت این تابش در طول موج خاص، میتوان دمای سطح جسم را محاسبه کرد. دوربینهای حرارتی معمولاً در بازه طیفی 3–5 µm (مادونقرمز کوتاه) و 8–14 µm (مادونقرمز بلند) کار میکنند.
سنسورهای مادونقرمز و کلاسبندی آنها
سنسورهای حرارتی را میتوان به دو گروه اصلی تقسیم کرد:
-
سنسورهای خنکشده (Cooled):
این سنسورها با استفاده از مبدل حرارتی به دمای بسیار پایین (زیر 77 K) میرسند تا نویز ترموالکتریک کاهش یابد. دقت و حساسیت بالایی دارند اما گرانقیمت و حجیم هستند.
-
سنسورهای Uncooled (میلهای یا میکروبولومتر):
در دمای محیط کار میکنند و اندازه و هزینه کمتری دارند. برای اغلب کاربردهای صنعتی و نظامی مناسباند اما دقت حرارتی آنها معمولاً کمتر از نمونههای خنکشده است.
خروجی سنسورها: نقشه دما به عنوان تصویر
خروجی دوربین حرارتی بهصورت یک ماتریس مقادیر دیجیتال (گرادینت خاکستری یا رنگی) است که هر پیکسل معادل دمای متناظر روی سطح جسم است. معمولاً برای نمایش بهتر، از پالتی رنگی (مثلاً Rainbow، Ironbow، یا Gray) استفاده میشود.
مراحل پردازش تصویر حرارتی
پردازش تصویر حرارتی شامل چندین گام متوالی است که به پالایش داده خام و استخراج اطلاعات معنیدار منجر میشود.
گام 1: کالیبراسیون و تصحیح رادیومتریک
هدف کالیبراسیون، تبدیل سیگنال خام دیجیتال دریافتی از سنسور به مقدار دقیق دما (در درجه سانتیگراد یا کلوین) است. این مرحله شامل:
کالیبراسیون کارخانهای: سنسور با یک منبع مرجع دمایی مقیاسبندی میشود.
تصحیح خطیسازی: اگر پاسخ سنسور به دما خطی نباشد، با استفاده از تابعی چندجملهای یا LUT (جدول نگاه-up)، خطیسازی انجام میشود.
اصلاح تأثیر محیط: توجه به شرایط اتمسفری، فاصله تا هدف و ضریب تشعشع سطح (Emissivity) برای تصحیح خوانشها.
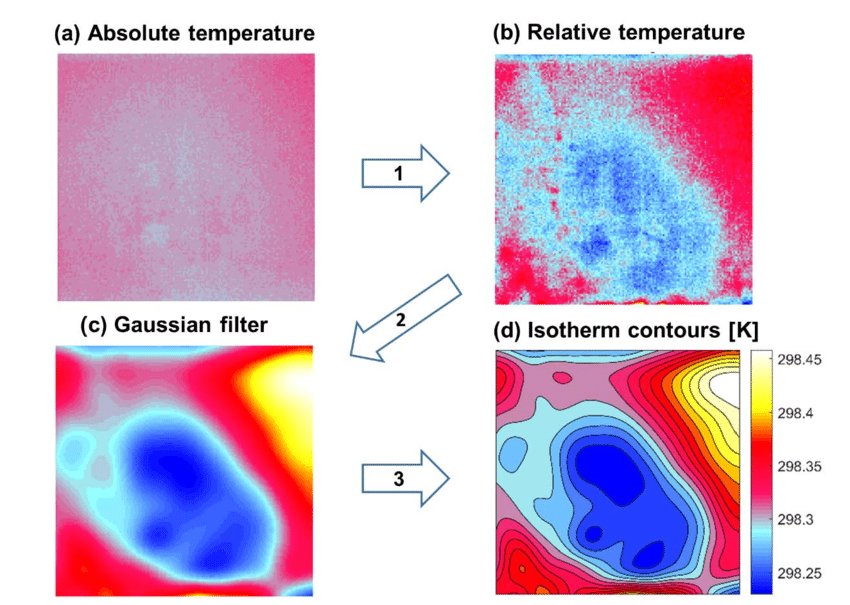
گام 2: پیشپردازش (نویزگیری، هموارسازی و بهبود کنتراست)
نویز حرارتی و نویز الکترونیکی میتواند دقت تحلیل را کاهش دهد. تکنیکهای رایج:
فیلتر میانگین (Mean Filter): کاهش نویز پراکنده
فیلتر گاوسی (Gaussian Filter): حفظ لبهها و هموارسازی ملایم
فیلتر مدین (Median Filter): حذف نویزهای تکپیکسلی شدید
هیستوگرام اکولایزیشن (Histogram Equalization): افزایش کنتراستگام 3: تبدیلهای هندسی و همترازی (Registration)
در بسیاری از کاربردها، دوربین حرارتی با دوربین مرئی یا چند دوربین حرارتی همزمان کار میکند. برای ترکیب دادهها (Image Fusion) یا تحلیل دومنظوره، تصاویر باید همتراز شوند:
کالیبراسیون هندسی (Intrinsic & Extrinsic Calibration): محاسبه ماتریسهای دوربین
همپوشانی نقاط قابل تشخیص: استفاده از نقاط مرجع (Checkerboard)
روشهای بهینهسازی: RANSAC برای حذف نقاط نویزی
گام 4: تفکیک و تقسیمبندی (Segmentation)
شناسایی نواحی با دمای خاص یا جداکردن اجسام از پسزمینه:
آستانهگذاری ساده (Global/Adaptive Thresholding)
کلاسیک مثل Otsu
روشهای مبتنی بر لبه (Canny, Sobel)
Region Growing
گام 5: استخراج ویژگی (Feature Extraction)
ویژگیهای ترمال مهم برای طبقهبندی و تحلیل:
ویژگیهای آماری: میانگین، انحراف معیار دما در یک ناحیه
ویژگیهای بافت (Texture): ماتریس هم-وقوع خاکستری (GLCM), LBP
ویژگیهای هندسی: مساحت و محیط ناحیه داغ یا سرد
ویژگیهای گرادیان: جهت و شدت تغییرات دما
گام 6: طبقهبندی و شناسایی (Classification & Detection)
با استفاده از ویژگیها، میتوان اشیا یا ناهنجاریهای حرارتی را شناسایی کرد:
- روشهای سنتی:
- SVM
- K-NN
- Random Forest
- یادگیری عمیق:
- CNN (Convolutional Neural Network) برای تشخیص اشیاء
- U-Net برای بخشبندی دقیق
- YOLO یا SSD برای شناسایی بلادرنگ
گام 7: تحلیل دمایی و کمیسازی
پس از شناسایی نواحی مورد نظر، میتوان گزارشها و نمودارهای دمایی استخراج کرد:
پلوت دمای ناحیه در زمان (Trend Analysis)
نقشههای کاذب (False-Color Maps)
گزارش اتوماتیک آلارم در فراتر رفتن از آستانه
تکنیکها و الگوریتمهای کلیدی
فیلترهای مکانی و فرکانسی
فیلتر گاوسی و میانگین: هموارسازی
فیلتر لاپلاسین: تشخیص لبه
تبدیل فوریه (FFT): حذف نویز فرکانسی مشخص
تکنیکهای مورفولوژیکی
ایروژن (Erosion) و دیلاتیشن (Dilation): حذف نویز و پرکردن حفرهها
آحاد و تفاضل مورفولوژیکال: جداسازی اشیاء
الگوریتمهای مبتنی بر آستانه (Thresholding)
آستانه جهانی (Global Thresholding)
آستانه تطبیقی (Adaptive Thresholding)
Otsu: یافتن آستانه بهینه با مینیمم واریانس
الگوریتمهای خوشهبندی (Clustering)
K-Means: تقسیم پیکسلها به K دسته بر اساس دما
Mean-Shift
DBSCAN: تشخیص نواحی متراکم دما
ماشین بردار پشتیبانی (SVM) و روشهای سنتی
SVM بهخاطر کارایی بالا در دادههای با ابعاد کم و متوسط برای دستهبندی مناطق با دمای نرمال و غیرنرمال کاربرد دارد.
شبکههای عصبی و یادگیری عمیق
CNN برای استخراج خودکار ویژگی
شبکههای مبتنی بر توجه (Attention-based) برای تمرکز بر نواحی داغ
Autoencoder برای تشخیص نواحی غیرعادی (Anomaly Detection)

چالشها و محدودیتها
نویز حرارتی و آشفتگی محیطی
نویز موقت و تغییرات ناگهانی دما باعث افت دقت میشود. استفاده از سنسورهای با نرخ فریم بالا و الگوریتمهای فیلترینگ پویا ضروری است.
اختلاف در ضریب تشعشع (Emissivity) سطوح
سطوح مختلف ضریب تشعشع متفاوتی دارند. برای اندازهگیری دقیق دما نیاز به تنظیم پارامتر Emissivity است.
رزولوشن محدود و پیکسلهای بزرگ
بسیاری از دوربینهای Uncooled رزولوشن پایینی (مثلاً 320×240) دارند و جزئیات ظریف دما را نمیتوانند ثبت کنند.
همپوشانی طیفی و تأثیر شرایط جوی
شرایط جوی مانند مه، باران و گردوغبار میتوانند در بازه مادونقرمز تداخل ایجاد کنند و تصویربرداری را مشکل سازند.
مسائل همترازی با دوربینهای مرئی
برای ترکیب دقیق تصاویر حرارتی و مرئی نیاز به الگوریتمهای همترازی قوی و مراجع مشترک دارید.
حوزههای کاربردی
پزشکی و تشخیص بیماری
تشخیص التهابات پوستی
نظارت بر جریان خون
شناسایی زودهنگام تب و عفونت
صنعت و کنترل کیفیت
بازرسی خطوط تولید الکترونیک
نظارت بر فرآیندهای جوشکاری و لحیمکاری
شناسایی نواحی داغ در تجهیزات برقی
امنیت و نظارت (Surveillance)
شناسایی ورود بدون مجوز در شب
ردیابی انسانها و وسایل نقلیه
نظارت بر محدودههای حساس
بازرسی ساختمان و عایقکاری
تشخیص خرابی عایق حرارتی
شناسایی نشت گرما در پنجرهها و درزها
ارزیابی عملکرد سیستمهای تهویه
کشاورزی هوشمند
مانیتورینگ تنش آبی گیاهان
تشخیص آفات با الگوی معامل دمایی
بهینهسازی مصرف آب و کود
خودروهای خودران
ادغام تصویر حرارتی با لیدار و دوربین مرئی برای دید همهجانبه
تشخیص عابر پیاده در شرایط نور کم یا مه
مطالعات موردی
تشخیص زودهنگام تب در بیمارستان
در یکی از بیمارستانهای پیشرفته، دوربینهای حرارتی جهت غربالگری بیماران در بدو ورود نصب شد. با الگوریتم یادگیری عمیق، با دقت بیش از ۹۸٪ موارد تبدار شناسایی شدند و از ورود افراد مشکوک به سایر بخشها جلوگیری شد.
بازرسی خطوط تولید نیمههادی
یک کارخانه تولید چیپهای الکترونیکی با استفاده از دوربین حرارتی قادر شده است نقصهای حرارتی در لحیمکاری را شناسایی و سریعا با فرایند اصلاحی اقدامات لازم را انجام دهد. درصد ضایعات کمتر از ۰.۵٪ کاهش یافته است.
سیستمهای نظارتی فرودگاهها
در چند فرودگاه بینالمللی، دوربینهای حرارتی با دوربینهای RGB ترکیب شدهاند تا در شب یا شرایط نامساعد جوی، نظارت بر زمین، باند و نواحی ممنوعه بهطور مؤثری انجام شود و هشدار بلادرنگ صادر گردد.
روندها و چشمانداز آینده
یکپارچگی با هوش مصنوعی و یادگیری تقویتی
یادگیری تقویتی (Reinforcement Learning) برای بهینهسازی خودکار پارامترهای پیشپردازش و کالیبراسیون در شرایط پویا بهزودی وارد عرصه میشود.
حسگرهای نسل جدید و دوربینهای ارزان
تولید سنسورهای CMOS-Microbolometer با رزولوشن بالاتر و قیمت پایینتر، پردازش تصویر حرارتی را در دسترس استارتاپها و مصارف خانگی قرار میدهد.
پردازش لبه (Edge Computing)
اجرای الگوریتمهای سبک روی تراشههای AI-SoC در دوربینها، پردازش برخط و بلادرنگ را امکانپذیر میسازد و نیاز به انتقال حجم بالای داده به سرور مرکزی را کاهش میدهد.
ترکیب چندمنظوره (Multi-Modal Fusion)
ادغام دادههای حرارتی، لیدار، رادار و RGB در یک چارچوب مشترک، چشمانداز جدیدی برای سیستمهای خودران، امنیت و رباتیک هوشمند باز خواهد کرد.
نتیجهگیری
پردازش تصویر حرارتی به عنوان حوزهای میانرشتهای، تلفیقی از فیزیک تابش، مهندسی سختافزار، علوم داده و هوش مصنوعی است. این فناوری با امکان اندازهگیری غیرمخرب دما، کاربردهای گستردهای در پزشکی، صنعت، امنیت و کشاورزی یافته و همچنان در حال رشد و توسعه است. شناخت مبانی فیزیکی تابش، تسلط بر مراحل پردازش (کالیبراسیون، پیشپردازش، تقسیمبندی، استخراج ویژگی و طبقهبندی) و آشنایی با چالشها و الگوریتمهای کلیدی، زیربنای طراحی سیستمهای کارآمد و دقیق را شکل میدهد. با پیشرفت حسگرها و الگوریتمهای هوش مصنوعی، شاهد بهکارگیری گستردهتر و هوشمندتر پردازش حرارتی در آینده خواهیم بود.
منابع پیشنهادی برای مطالعه بیشتر
- Joseph C. Russ, “The Image Processing Handbook”, CRC Press.
- R. Adrian Williamson, “Thermal Imaging Systems: Design and Analysis”, Wiley.
- G. Scott, “Digital Image Processing of Thermal Infrared Imagery”, SPIE Tutorial Texts in Optical Engineering.
- مقالههای مروری در مجلههای IEEE Transactions on Geoscience and Remote Sensing و Infrared Physics & Technology.
- مستندات شرکتهای تولیدکننده دوربین حرارتی نظیر FLIR و Optris.
با امید به اینکه این راهنما به درک عمیقتر و بهکارگیری مؤثر پردازش تصویر حرارتی در پروژههای شما کمک کند. اگر سؤال یا تجربهای در این زمینه دارید، خوشحال میشویم در بخش نظرات آن را با ما در میان بگذارید!
پرسشهای متداول (FAQs)
1 پردازش تصویر حرارتی چیست؟
پردازش تصویر حرارتی فنّاوری ثبت و تحلیل تابش مادونبنفش ساطعشده از اجسام برای تولید نقشه دمایی دقیق بدون تماس مستقیم است.
2 کاربردهای اصلی پردازش تصویر حرارتی کدامند؟
این تکنیک در پزشکی (تشخیص التهاب و تب)، صنعت (کنترل کیفیت و بازرسی خطوط تولید)، امنیت (نظارت شبانه) و کشاورزی هوشمند کاربرد گسترده دارد.
3 تفاوت تصویر حرارتی با تصویر مرئی چیست؟
تصاویر مرئی براساس نور بازتابی از سطح اجسام شکل میگیرند، اما تصاویر حرارتی براساس تابش مادونبنفش ناشی از دمای اجسام تولید میشوند.
4 دوربینهای حرارتی چه بازههای طول موجی دارند؟
معمولاً در دو بازه مادونبنفش کوتاه (3–5 میکرون) و بلند (8–14 میکرون) عمل میکنند تا طیف تابشهای حرارتی را پوشش دهند.
5 چرا کالیبراسیون رادیومتریک مهم است؟
کالیبراسیون رادیومتریک تضمین میکند که سیگنال خام سنسور به مقادیر دمایی دقیق تبدیل شود و نتایج تحلیل قابل اعتماد باشند.
6 چگونه نویز حرارتی را کاهش دهیم؟
میتوان با استفاده از فیلترهای میانگین، گاوسی یا مدین و همچنین روشهای حذف نویز فرکانسی، کیفیت تصویر را بهبود بخشید.
7 روشهای تقسیمبندی در تصاویر حرارتی چیست؟
آستانهگذاری (Thresholding)، خوشهبندی (Clustering) مانند K-Means و الگوریتم Region Growing از رایجترین روشها برای تفکیک نواحی دمایی هستند.
8 مزایای استفاده از یادگیری عمیق در تحلیل تصاویر حرارتی چیست؟
شبکههای عصبی عمیق بهصورت خودکار ویژگیهای پیچیده دمایی را استخراج میکنند، دقت شناسایی را افزایش میدهند و قابلیت دستهبندی بلادرنگ دارند.
9 چالشهای استفاده از دوربینهای Uncooled چیست؟
رزولوشن کمتر، حساسیت پایینتر به تغییرات دمای کوچک و تأثیرپذیری بیشتر از نویز الکترونیکی از مهمترین محدودیتهای آنها است.
10 آینده پردازش تصویر حرارتی چه روندهایی دارد؟
ادغام حسگرهای ارزانقیمت، پردازش لبه (Edge Computing)، یادگیری تقویتی و ترکیب داده چندمنظوره (Multi-Modal Fusion) روندهای کلیدی آینده هستند.





