انقلاب متولوژی سهبعدی: بررسی جامع و عمیق سنسورهای پروفایل لیزری هایک ربات (Hikrobot 3D Laser Vision)

مقدمه: فراتر از دو بعد، به سوی دقت میکرونی در دنیای اتوماسیون صنعتی، جایی که دقت و سرعت دو روی یک سکه هستند، بینایی ماشین (Machine Vision) سالهاست که حکم چشمهای خط تولید را دارد….
مقدمه: فراتر از دو بعد، به سوی دقت میکرونی
در دنیای اتوماسیون صنعتی، جایی که دقت و سرعت دو روی یک سکه هستند، بینایی ماشین (Machine Vision) سالهاست که حکم چشمهای خط تولید را دارد. اما بیایید صادق باشیم؛ دوربینهای دوبعدی (2D Area Scan) با تمام پیشرفتهایشان، در برابر یک چالش بزرگ کم میآورند: عمق. وقتی صحبت از سنجش ارتفاع قطعات الکترونیکی، بررسی همسطحی (Coplanarity) پینهای کانکتور، یا تشخیص نقصهای جوش روی بدنهی باتریهای لیتیومی میشود، تصویر دوبعدی دیگر کافی نیست. اینجاست که تکنولوژی لیزر ویژن (Laser Vision) و به طور خاص، سنسورهای پروفایل لیزری سه بعدی (3D Laser Profile Sensors) وارد میدان میشوند.
امروز میخواهیم شیرجهای عمیق (Deep Dive) بزنیم به دنیای سنسورهای سری DP شرکت Hikrobot. چرا هایکربات؟ چون این غول تکنولوژی چینی، با ترکیب الگوریتمهای هوش مصنوعی و سختافزارهای اپتیکی پیشرفته، محصولاتی را روانه بازار کرده که نه تنها با برندهای مطرح اروپایی و ژاپنی رقابت میکنند، بلکه در برخی پارامترهای کلیدی مثل نسبت عملکرد به قیمت، استانداردهای جدیدی را تعریف کردهاند.
در این مقاله ما میخواهیم مهندسی معکوس ذهنی انجام دهیم. از فیزیک مثلثسازی لیزری (Laser Triangulation) و اصل Scheimpflug شروع میکنیم، وارد معماری سختافزاری سری DP میشویم، قابلیتهای نرمافزار قدرتمند VisionMaster را کالبدشکافی میکنیم و در نهایت، کاربردهای واقعی این تکنولوژی را در صنایع حساس بررسی خواهیم کرد.
فصل اول: فیزیک دقت؛ لیزر پروفایلر چگونه کار میکند؟
برای درک اینکه چگونه هایکربات به دقتهای میکرونی (تا 2 میکرومتر و کمتر) دست پیدا میکند، باید ابتدا اصول پایه را مرور کنیم. سنسورهای سری DP بر مبنای تکنیک مثلثسازی لیزری (Laser Triangulation) کار میکنند. اما این یک مثلثسازی ساده نیست.
۱.۱. مثلثسازی لیزری (Laser Triangulation)
تصور کنید یک خط لیزر روی جسمی تابانده میشود. یک دوربین (سنسور تصویر) از زاویهای مشخص به این خط نگاه میکند. اگر جسم بالا یا پایین برود (تغییر در محور Z)، موقعیت خط لیزر روی سنسور دوربین تغییر میکند. با داشتن زاویه تابش لیزر، زاویه دوربین و فاصله بین آنها (Baseline)، میتوان ارتفاع دقیق هر نقطه از خط لیزر را با روابط مثلثاتی محاسبه کرد.
در این ساختار، ابتدا متغیرها تعریف میشوند تا خواننده قبل از دیدن فرمول، ذهنیتی شفاف داشته باشد:
«فرض کنید فاصله مبنا (Baseline) بین منبع لیزر و سنسور دوربین باشد. اگر زاویه تابش لیزر و زاویه دید دوربین (نسبت به افق یا خط واصل) در نظر گرفته شود و نشاندهنده موقعیت نقطه لیزر روی سنسور باشد، ارتفاع (با تقریب برای فواصل دور) از رابطه زیر قابل محاسبه است:
که در آن، تابع تبدیلی است که موقعیت پیکسلی را به زاویه دید لحظهای دوربین نگاشت میکند.»
هایکربات در سری DP، این مفهوم ساده را به کمال رسانده است. آنها از سنسورهای CMOS با سرعت بسیار بالا استفاده میکنند که میتوانند هزاران بار در ثانیه این محاسبات را انجام دهند.

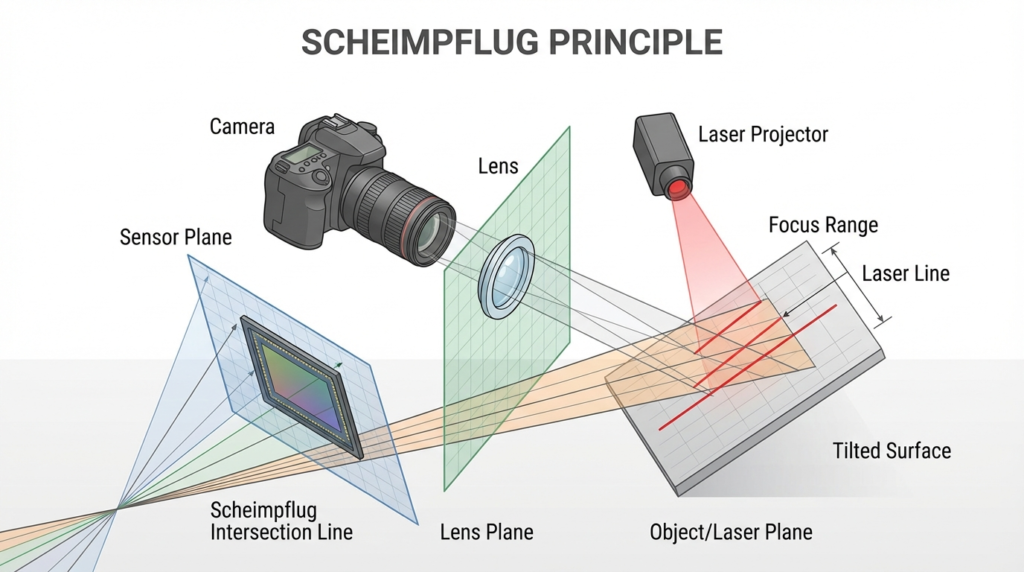
۱.۲. اصل شایمپفلوگ (Scheimpflug Principle)
اینجا جایی است که مهندسی اپتیک هنرنمایی میکند. در عکاسی معمولی، صفحه لنز و صفحه سنسور موازی هستند. اما در سنسورهای لیزری، چون دوربین با زاویه به سطح نگاه میکند، عمق میدان (Depth of Field) بسیار محدود میشود. یعنی فقط بخش کوچکی از لیزر در فوکوس است.
مهندسان هایکربات برای حل این مشکل از اصل Scheimpflug استفاده کردهاند. طبق این اصل، اگر صفحه تصویر (سنسور)، صفحه لنز و صفحه سوژه (خط لیزر) همه در یک خط مشترک همدیگر را قطع کنند، تمام سوژه در فوکوس خواهد بود. این طراحی هوشمندانه در سری DP باعث شده تا حتی در دامنههای اندازهگیری (Measurement Range) بزرگ، تصویر لیزر کاملاً شارپ و دقیق باقی بماند.
۱.۳. جنگ طول موجها: لیزر آبی ۴۰۵ نانومتر در برابر قرمز ۶۵۰ نانومتر
سری DP هایکربات در دو نوع لیزر عرضه میشود و انتخاب بین این دو، حیاتی است:
-
لیزر قرمز (Red Laser – 650nm): کلاسیک، پرقدرت و مناسب برای اکثر کاربردها. اما یک مشکل دارد: نفوذ در برخی مواد و ایجاد پدیده Speckle (دانهدانه شدن نور لیزر) که دقت را کاهش میدهد.
-
لیزر آبی (Blue Laser – 405nm): ستارهی درخشان سریهای دقیق مثل MV-DP3xxx. طول موج کوتاهتر نور آبی باعث میشود پراش (Diffraction) کمتری رخ دهد و تمرکز پرتو بهتر باشد. مهمتر از همه، نور آبی روی سطوح براق فلزی (مثل باتریهای لیتیومی صیقلی) یا سطوح نیمهشفاف، عملکرد بسیار بهتری دارد و نویز کمتری تولید میکند. هایکربات با استفاده از لیزرهای آبی Ultra-uniform، لبههای جسم را با شارپنس فوقالعادهای استخراج میکند.
فصل دوم: کالبدشکافی سختافزاری سری DP Hikrobot
بیایید کاپوت را بالا بزنیم و ببینیم هایکربات چه چیزی برای ما تدارک دیده است. سری DP (Displacement/Profile) قلب تپندهی راهحلهای سه بعدی این شرکت است.
۲.۱. مشخصات فنی خیرهکننده
بر اساس آخرین دیتاشیتها و بررسیهای فنی (تا سال ۲۰۲۵)، مدلهای پیشرفتهی این سری (مانند DP3580 یا نسخههای جدیدتر) دارای مشخصاتی هستند که رقبا را به چالش میکشند:
-
سرعت اسکن (Scan Rate): تا ۴۶,۷۰۰ پروفایل در ثانیه (46.7 kHz) و در برخی مدلهای خاص تا ۴۹ کیلوهرتز. این یعنی سنسور میتواند در یک ثانیه، ۴۶ هزار برش عرضی از جسم متحرک بگیرد. این سرعت برای خطوط تولیدی که قطعات با سرعت چند متر بر ثانیه حرکت میکنند، حیاتی است.
-
رزولوشن افقی (X-axis Resolution): تا ۳۲۰۰ نقطه در هر پروفایل. یعنی عرض میدان دید به ۳۲۰۰ قسمت تقسیم میشود. این تراکم نقاط اجازه میدهد حتی کوچکترین خراشها یا حفرهها دیده شوند.
-
دقت محور Z (Repeatability): در حد میکرومتر (mu m). در برخی مدلهای با میدان دید کوچک (Small FOV)، این تکرارپذیری به زیر ۱ میکرومتر میرسد.
-
پردازش داخلی (On-board Processing): یکی از نقاط قوت هایکربات، استفاده از FPGAهای قدرتمند و SoCهای اختصاصی داخل خود سنسور است. استخراج خط لیزر (Peak Extraction) داخل دوربین انجام میشود، نه در کامپیوتر. این کار بار پردازشی PC را به شدت کاهش میدهد و پایداری سیستم را تضمین میکند.
۲.۲. سنسورهای تصویر HDR و تکنولوژی Multi-Exposure
یکی از بزرگترین چالشهای بینایی سه بعدی، تضاد نوری (Contrast) است. تصور کنید میخواهید یک برد PCB را اسکن کنید که هم پایههای فلزی براق (لحیم) دارد و هم سطح سیاه و مات خود برد. با تنظیمات معمولی، یا فلزات اشباع (سفید خالص) میشوند یا سطح سیاه دیده نمیشود.
هایکربات در سری DP از سنسورهای High Dynamic Range (HDR) استفاده میکند. علاوه بر این، تکنیک Wide Dynamic Range (WDR) و Multi-Exposure (نوردهی چندگانه) به صورت سختافزاری پیادهسازی شده است. سنسور در آن واحد چندین شات با نوردهیهای مختلف میگیرد و آنها را ترکیب میکند تا هم قسمتهای تاریک و هم قسمتهای براق با جزئیات کامل ثبت شوند. این ویژگی برای بازرسی جوش باتریها که در آن ناحیه جوش بسیار براق و ناحیه اطراف مات است، حیاتی است.
فصل سوم: نرمافزار VisionMaster؛ مغز متفکر عملیات
سختافزار عالی بدون نرمافزار قدرتمند، مثل یک ماشین اسپرت بدون راننده است. پلتفرم نرمافزاری VisionMaster (VM) هایکربات، جایی است که جادو اتفاق میافتد. این نرمافزار با داشتن بیش از ۱۰۰۰ اپراتور پردازش تصویر، یکی از کاملترین ابزارها در صنعت است.
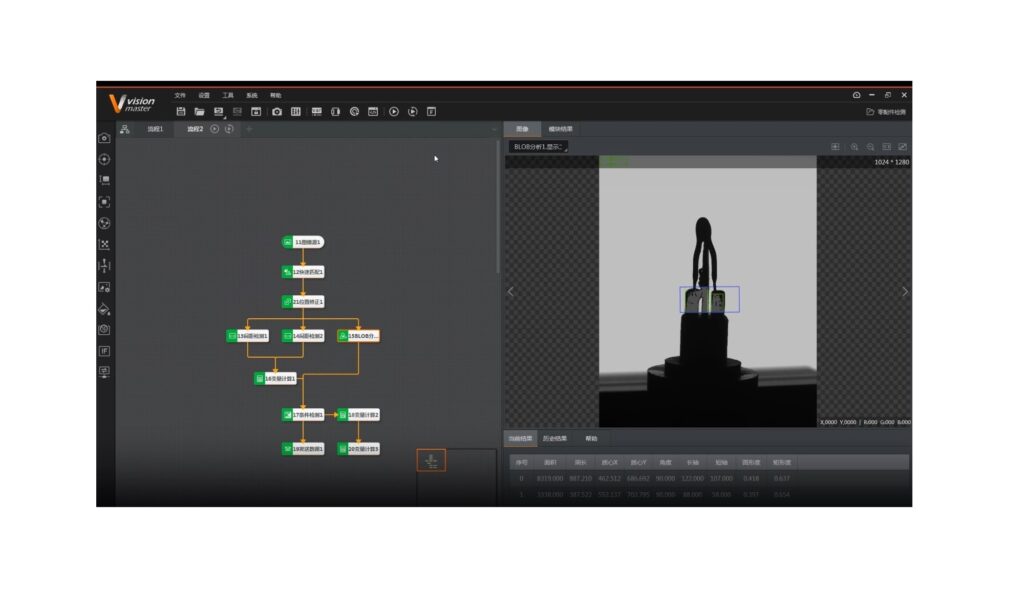
۳.۱. محیط توسعه بدون کدنویسی (No-Code / Low-Code)
VisionMaster بر اساس فلوچارت (Flowchart) کار میکند. مهندسان میتوانند ماژولهای مختلف را با دراگ-اند-دراپ (Drag & Drop) به هم وصل کنند. این ویژگی سرعت توسعه (Development Time) را به شدت کاهش میدهد. اما برای کاربران حرفهای، امکان اسکریپتنویسی و استفاده از SDKهای C++ و C# نیز وجود دارد.
۳.۲. ابزارهای اختصاصی 3D در VisionMaster
بخش سه بعدی VM مجموعهای از ابزارهای قدرتمند را ارائه میدهد:
-
Depth Map Generation: تبدیل دادههای ابر نقاط (Point Cloud) به تصاویر عمق (Depth Map) که میتوان با ابزارهای پردازش تصویر دوبعدی روی آنها کار کرد.
-
3D Correction & Stitching: اگر جسم بزرگتر از میدان دید یک سنسور باشد، VM میتواند خروجی چندین سنسور DP را به صورت خودکار به هم بدوزد (Stitching) و یک مدل سه بعدی یکپارچه بسازد.
-
Height Measurement: اندازهگیری اختلاف ارتفاع بین دو سطح با دقت زیر پیکسل.
-
Planarity (Flatness): بررسی تخت بودن سطح (مثلاً برای بررسی درب باتری ماشینهای الکتریکی).
-
Volume Measurement: محاسبه دقیق حجم چسب یا خمیر قلع (Solder Paste) تزریق شده.
۳.۳. الگوریتمهای پیشرفته
-
Subpixel Super-resolution: الگوریتمهای درونیابی (Interpolation) هایکربات اجازه میدهند دقت اندازهگیری تا ۰.۰۵ پیکسل افزایش یابد.
-
Point Cloud Matching: قابلیت تطبیق مدل سه بعدی اسکن شده با مدل CAD اصلی برای تشخیص انحرافات ساختاری.
فصل چهارم: کاربردهای صنعتی؛ سری DP در میدان عمل
تئوری کافیست؛ بیایید ببینیم این سنسورها در دنیای واقعی چه میکنند. تمرکز اصلی هایکربات بر سه صنعت کلیدی است: باتریهای لیتیومی (New Energy)، الکترونیک مصرفی (3C) و مدارات چاپی (PCB).
۴.۱. صنعت باتریهای لیتیومی (The Lithium Battery Boom)
اینجا جایی است که هایکربات واقعاً میدرخشد.
-
بازرسی جوش (Weld Seam Inspection): در تولید باتریهای منشوری (Prismatic) و استوانهای، کیفیت جوش درب باتری حیاتی است. سنسورهای سری DP با لیزر آبی، پروفایل جوش را اسکن میکنند تا حفرهها (Blowholes)، برآمدگیها و نقصهای پیوستگی را پیدا کنند. سرعت بالای سنسور اجازه میدهد این کار روی خطوط تولید پرسرعت بدون توقف انجام شود.
-
بررسی تخت بودن (Flatness) قطبها: سطح قطبهای باتری باید کاملاً تخت باشد تا اتصال الکتریکی کامل برقرار شود. ابزارهای Planarity در VisionMaster این پارامتر را در کسری از ثانیه چک میکنند.
-
اندازهگیری ضخامت الکترودها: با استفاده از دو سنسور در بالا و پایین (Opposed setup)، ضخامت ورقهای الکترود با دقت میکرونی کنترل میشود.
۴.۲. الکترونیک مصرفی (3C: Computer, Communication, Consumer Electronics)
-
بازرسی چسب (Glue Bead Inspection): در مونتاژ گوشیهای هوشمند، چسبهای آببندی باید با حجم و مسیر دقیقی تزریق شوند. سنسورهای DP پروفایل چسب را اسکن کرده و هرگونه قطعی یا تغییر در حجم چسب را تشخیص میدهند.
-
همسطحی پینهای کانکتور (Connector Pin Coplanarity): اگر یکی از پینهای یک کانکتور CPU یا USB کمی بالاتر یا پایینتر باشد، اتصال برقرار نمیشود. سنسورهای لیزری ارتفاع تکتک پینها را نسبت به یک سطح مرجع میسنجند.
-
Gap & Flush: اندازهگیری فاصله و همسطحی بین بدنه فلزی گوشی و صفحه نمایش شیشهای. این پارامتر مستقیماً روی زیبایی و کیفیت محصول نهایی تاثیر دارد.
۴.۳. بردهای مدار چاپی (PCB & PCBA)
-
بازرسی خمیر قلع (SPI – Solder Paste Inspection): قبل از قرارگیری قطعات، حجم و شکل خمیر قلع چاپ شده روی برد باید بررسی شود. اگرچه دستگاههای SPI اختصاصی وجود دارند، اما سنسورهای DP هایکربات راهکاری اقتصادی و دقیق برای ماژولهای خاص ارائه میدهند.
-
چک کردن حضور قطعات (Presence/Absence): تشخیص قطعات سیاه روی برد سیاه (Black-on-Black) که برای دوربینهای دوبعدی کابوس است، برای سنسور سه بعدی مثل آب خوردن است چون برمبنای ارتفاع کار میکند نه رنگ.
فصل پنجم: چرا هایکربات؟
در بازاری که غولهایی مثل Keyence، Cognex و LMI حضور دارند، چرا باید Hikrobot را انتخاب کرد؟
-
نسبت قیمت به عملکرد (Cost-Performance Ratio): این شاید بزرگترین برگ برنده باشد. هایکربات مشخصاتی نزدیک (و گاهی برابر) با برندهای برتر جهان را با قیمتی به مراتب رقابتیتر ارائه میدهد.
-
اکوسیستم یکپارچه: ترکیب سنسورهای سری DP با نرمافزار VisionMaster و کنترلرهای صنعتی (Vision Controllers) هایکربات، یک پکیج کامل را میسازد که مشکلات ناسازگاری (Compatibility) را حذف میکند.
-
پشتیبانی از استانداردهای باز: برخلاف برخی برندها که سیستمهای بسته دارند، هایکربات از استانداردهای صنعتی مثل GenICam پشتیبانی میکند، بنابراین میتوانید سنسورهای آنها را در نرمافزارهای شخص ثالث (مانند HALCON یا LabVIEW) نیز استفاده کنید.
-
نوآوری در AI: هایکربات پیشرو در ادغام یادگیری عمیق (Deep Learning) با دادههای سه بعدی است. استفاده از شبکههای عصبی روی ابر نقاط (Point Cloud) برای طبقهبندی عیوب پیچیده، مرزهای جدیدی را باز کرده است.
فصل ششم: راهنمای عملی راهاندازی
برای اینکه این مقاله کاربردیتر شود، بیایید مراحل کلی راهاندازی یک پروژه اندازهگیری ارتفاع ساده با سنسور DP و نرمافزار VisionMaster را مرور کنیم:
-
نصب فیزیکی: سنسور را با زاویه مناسب (معمولاً عمود بر سطح حرکت) نصب کنید. اطمینان حاصل کنید که فاصله کاری (Working Distance) در محدوده مجاز سنسور (مثلاً CD=200mm) باشد.
-
تنظیمات اسکن (Acquisition Setup): در نرمافزار VM، پارامترهای تریگر (Encoder Trigger) را تنظیم کنید تا پروفایلها بر اساس حرکت نوار نقاله ثبت شوند. این کار از کشیدگی یا فشردگی تصویر جلوگیری میکند.
-
تنظیم نوردهی (Exposure Tuning): از حالت HDR یا Auto-Exposure استفاده کنید تا پروفایل لیزر روی تمام قسمتهای قطعه واضح باشد.
-
تولید ابر نقاط: دادههای خام پروفایل را جمعآوری کرده و به یک تصویر عمق (Depth Map) تبدیل کنید.
-
اعمال ابزار اندازهگیری: ابزار Height Measurement را از تولباکس VM بکشید و روی تصویر رها کنید. ناحیه مرجع (Reference Region) و ناحیه اندازهگیری را مشخص کنید.
-
تنظیم تلورانس: محدودههای مجاز (Min/Max) را تعیین کنید تا سیستم خروجی OK/NG بدهد.

نتیجهگیری: آینده روشن است
صنعت بینایی ماشین در حال گذار تاریخی از 2D به 3D است. سنسورهای پروفایل لیزری هایکربات (Hikrobot DP Series) نه تنها ابزارهایی برای اندازهگیری هستند، بلکه دروازهای به سوی اتوماسیون هوشمندتر، دقیقتر و قابلاطتمادتر محسوب میشوند. با ترکیب اپتیک دقیق، لیزرهای آبی و قرمز، و قدرت نرمافزاری VisionMaster، این شرکت نشان داده که کیفیت بالا لزوماً به معنای هزینههای نجومی نیست.
برای مهندسان و مدیران تولیدی که به دنبال ارتقای خطوط تولید خود هستند، نادیده گرفتن پتانسیلهای این تکنولوژی اشتباه بزرگی خواهد بود. چه در حال ساخت باتریهای نسل بعد باشید و چه تولید قطعات الکترونیکی ظریف، دیدن به معنای واقعی کلمه (در سه بعد)، کلید موفقیت شماست.
سنسور پروفایل لیزری ابزاری است که با استفاده از تابش خط لیزر و یک دوربین زاویهدار، شکل سهبعدی اجسام را بازسازی میکند. برخلاف دوربینهای 2D که تنها کنتراست و رنگ را تشخیص میدهند و فاقد اطلاعات عمق هستند، این سنسورها میتوانند ارتفاع (Z)، حجم و فرم هندسی قطعات را با دقت میکرونی اندازهگیری کنند که برای تشخیص عیوب فیزیکی مثل فرورفتگی یا همسطحی حیاتی است.
این تکنیک اساس کار سنسور پروفایل لیزری است. یک لیزر خطی به جسم تابانده میشود و سنسور دوربین از زاویهای مشخص به آن نگاه میکند. تغییر در ارتفاع سطح جسم باعث جابجایی خط لیزر روی سنسور تصویر میشود. با داشتن فاصله بین لیزر و دوربین و زوایای تابش، سیستم با استفاده از روابط مثلثاتی، پروفایل دقیق ارتفاعی جسم را محاسبه میکند.
لیزر آبی طول موج کوتاهتری دارد و دچار پراش کمتری میشود. در سنسور پروفایل لیزری سری DP هایکربات، استفاده از لیزر آبی باعث میشود که روی سطوح براق فلزی (مانند باتریها) یا سطوح نیمهشفاف، نویز کمتری ایجاد شود و لبههای جسم با شارپنس و دقت بسیار بالاتری نسبت به لیزر قرمز ثبت گردند.
در سنسور پروفایل لیزری، دوربین با زاویه به سطح نگاه میکند که معمولاً باعث میشود بخشی از تصویر تار شود. اصل شایمپفلوگ با زاویهدار کردن لنز و سنسور نسبت به هم، باعث میشود که تمام خط لیزر در عمق میدان دید (Focus) قرار گیرد. این تکنیک تضمین میکند که دقت اندازهگیری در تمام بازه ارتفاعی سنسور یکسان و بالا باشد.
این سنسورها برای کاربردهای بسیار دقیق طراحی شدهاند. در مدلهای با میدان دید کوچک، دقت تکرارپذیری (Repeatability) در محور Z به زیر ۱ میکرومتر میرسد. همچنین رزولوشن افقی تا ۳۲۰۰ نقطه در هر پروفایل، امکان شناسایی ریزترین جزئیات را فراهم میکند.
بسیاری از قطعات صنعتی دارای بخشهای همزمان تیره (مات) و روشن (براق) هستند (مانند PCB یا جوش فلزات). قابلیت HDR در سنسور پروفایل لیزری با گرفتن چندین تصویر با نوردهیهای مختلف و ترکیب آنها، مانع از سیاه شدن بخشهای تیره یا اشباع شدن (سفید شدن) بخشهای براق میشود و پروفایلی کامل و بدون نقص ارائه میدهد.
نرمافزار VisionMaster هایکربات یک پلتفرم توسعه گرافیکی و بدون نیاز به کدنویسی (No-Code) است. این نرمافزار ابزارهای تخصصی پردازش سه بعدی مانند تولید نقشه عمق (Depth Map)، دوخت سه بعدی (Stitching) و اندازهگیری حجم را به صورت بلوکهای آماده در اختیار کاربر قرار میدهد که سرعت راهاندازی سنسور پروفایل لیزری را به شدت افزایش میدهد.
در صنعت باتری، سنسور پروفایل لیزری نقش حیاتی دارد. از آن برای بازرسی کیفیت جوش درب باتری (تشخیص حفره و پیوستگی)، بررسی تخت بودن (Flatness) قطبهای باتری و اندازهگیری ابعاد دقیق سلولها استفاده میشود تا از ایمنی و عملکرد باتری اطمینان حاصل شود.
بله، این یکی از کاربردهای اصلی است. سنسور پروفایل لیزری برای بررسی همسطحی (Coplanarity) پینهای کانکتورها، بازرسی حجم و مسیر چسبزنی (Glue Bead) در گوشیهای موبایل و تشخیص حضور قطعات سیاه روی بردهای مدار چاپی سیاه (که برای دوربینهای معمولی دشوار است) ایدهآل است.
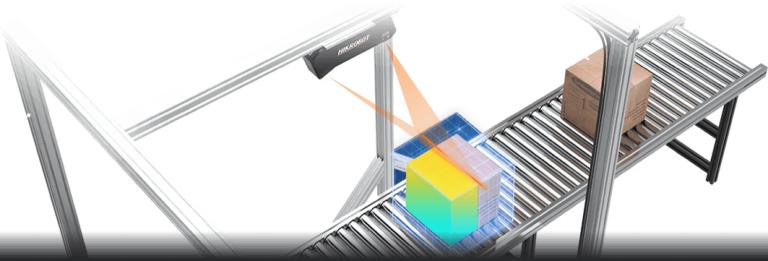
برای جلوگیری از کشیدگی یا فشردگی تصویر در سرعتهای متغیر خط تولید، سنسور پروفایل لیزری مجهز به ورودی انکودر (Encoder) است. با اتصال انکودر نوار نقاله به سنسور، عملیات اسکن دقیقاً با حرکت جسم هماهنگ میشود و حتی با تغییر سرعت خط، ابعاد تصویر ثابت و دقیق باقی میماند. سرعت اسکن این سنسورها تا ۴۶ کیلوهرتز (۴۶۰۰۰ پروفایل در ثانیه) میرسد.





