الگوریتمهای بینایی ماشین: قلب تپنده پردازش تصویر در دنیای هوشمند

الگوریتمهای بینایی ماشین ستون فقرات سیستمهایی هستند که به کامپیوترها و ماشینها امکان «دیدن» و تفسیر دنیای بصری را میدهند. از هدایت رباتهای صنعتی در خطوط تولید تا تأمین بخش ادراکی خودروهای خودران، این الگوریتمها…
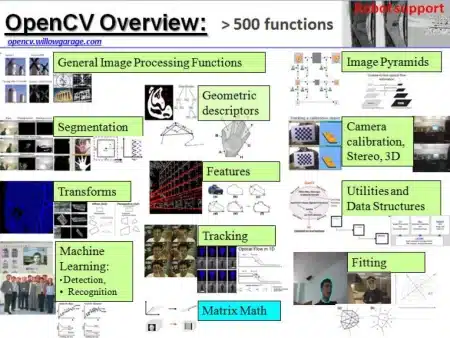
الگوریتمهای بینایی ماشین ستون فقرات سیستمهایی هستند که به کامپیوترها و ماشینها امکان «دیدن» و تفسیر دنیای بصری را میدهند. از هدایت رباتهای صنعتی در خطوط تولید تا تأمین بخش ادراکی خودروهای خودران، این الگوریتمها دادههای خام پیکسلی را به بینشهای عملی تبدیل میکنند. در این مقاله به بررسی دستههای اصلی الگوریتمهای بینایی ماشین، مراحل یک خطلوله (Pipeline) بینایی، تکنیکها و معماریهای متداول، کاربردهای واقعی، چالشها و چشماندازهای آتی میپردازیم.
۱. ستون فقرات بینایی ماشین
یک سیستم بینایی ماشین معمولی دارای مراحل زیر است:
-
دریافت تصویر
ضبط تصاویر یا فریمهای ویدئویی با استفاده از دوربینها یا حسگرهای دیگر (مثلاً مادون قرمز، عمق). نکات کلیدی: وضوح (Resolution)، نرخ فریم، دامنه دینامیکی و تنظیمات اپتیکی (لنزها، نورپردازی). -
پیشپردازش
آمادهسازی تصاویر خام برای تحلیل—کاهش نویز (مثلاً فیلتر گاوسی)، نرمالسازی، یکسانسازی هیستوگرام و تصحیحات هندسی (اصلاح اعوجاج، تبدیل پرسپکتیو). -
استخراج ویژگی
شناسایی الگوهای مهم در تصویر. روشهای کلاسیک شامل تشخیص لبه و گوشه با فیلترها (Sobel, Canny)، یا استخراج توصیفگرهایی مانند SIFT، SURF و ORB. -
بخشبندی و تشخیص
تقسیم تصویر به نواحی معنادار یا پیدا کردن اشیاء مورد نظر. روشها از آستانهگذاری و عملیات مورفولوژی تا شناسایی مبتنی بر یادگیری عمیق (Faster R‑CNN, YOLO, SSD) متغیرند. -
شناسایی و دستهبندی
برچسبگذاری اشیاء یا نواحی شناساییشده. روشهای کلاسیک شامل SVM یا k‑NN بر پایه ویژگیهای دستی؛ شبکههای عصبی پیچشی (CNN) اکنون این مرحله را تحت سلطه دارند. -
پسپردازش و تصمیمگیری
پالایش نتایج، ادغام دیدگاههای چندگانه و ارسال بینشها به کاربردهای سطح بالا (کنترل ربات، بازرسی کیفیت، درک صحنه). -
بازخورد و تطبیق
در سیستمهای هوشمند، حلقههای بازخورد به صورت بلادرنگ پارامترهای الگوریتم، نور یا فوکوس را برای حفظ عملکرد تنظیم میکنند.

۲. الگوریتمهای کلاسیک بینایی ماشین
پیش از انقلاب یادگیری عمیق، الگوریتمهای کلاسیک ستون فقرات بینایی بودند.
۲.۱ تشخیص لبه و گوشه
-
فیلترهای Sobel و Prewitt با محاسبه گرادیانهای شدت در راستای افقی و عمودی لبهها را برجسته میکنند.
-
Canny Edge Detector با چند مرحله: هموارسازی گاوسی، محاسبه گرادیان، سرکوب غیراستاندارد، و آستانهگذاری هیسترزیس، لبههای نازک و پیوسته ایجاد میکند.
-
Harris Corner Detector تابع پاسخ گوشه بر اساس تغییرات گرادیان دو جهتی را محاسبه میکند.
۲.۲ توصیفگرهای ویژگی
-
SIFT نقاط کلیدی را استخراج و توصیفگرهای مقاوم به مقیاس، چرخش و تغییرات روشنایی میسازد.
-
SURF با استفاده از تصاویر انتگرالی و جلسهی هسین سریعتر از SIFT عمل میکند.
-
ORB ترکیب FAST برای تشخیص نقاط و BRIEF برای توصیفگر، جایگزین رایگان و سبک ارائه میدهد.
۲.۳ بخشبندی و مورفولوژی
-
آستانهگذاری (Thresholding) با روشهای اوتسو یا آستانهگذاری تطبیقی.
-
رشد ناحیه و Watershed گروهبندی پیکسلها بر اساس شباهت؛ Watershed شدت را بهصورت توپوگرافی در نظر میگیرد.
-
عملیات مورفولوژیک (فرسایش، گسترش، بازکردن، بستن) برای اصلاح ماسکهای دودویی و حذف نویز به کار میروند.
۲.۴ تطبیق الگو (Template Matching)
لغزاندن الگو روی تصویر با محاسبه همبستگی یا مجموع قدر مطلق اختلافات؛ ساده اما به تغییرات مقیاس، چرخش و نور حساس است.
۳. یادگیری عمیق در بینایی ماشین
با بازگشت شبکههای عصبی، معماریهای عمیق دقت و پایداری بیشتری ارائه میکنند.
۳.۱ شبکههای عصبی پیچشی (CNN)
-
مبانی: لایههای کانولوشن فیلترهای مکانی را یاد میگیرند، پولینگ اطلاعات را تجمیع میکند و لایههای تماممتصل به کلاسبندی میپردازند.
-
معماریهای مشهور:
-
AlexNet: با پنج لایه کانولوشن و سه لایه تماممتصل؛ نقطه عطف در ۲۰۱۲.
-
VGGNet: عمق زیاد (۱۶–۱۹ لایه) با فیلترهای ۳×۳ برای بهبود دقت.
-
ResNet: اتصالات باقیمانده (skip connections) برای آموزش آسانتر شبکههای فوقالعاده عمیق (تا ۱۵۲ لایه).
-
DenseNet: هر لایه به تمام لایههای بعدی متصل است، جریان گرادیان و کارایی پارامترها را بهبود میبخشد.
-
۳.۲ شناسایی اشیاء
-
دوتایی (Two‑Stage):
-
خانواده R‑CNN: تولید پیشنهادات ناحیهای، سپس طبقهبندی و اصلاح جعبههای محدودکننده.
-
-
تکمرحلهای (One‑Stage):
-
YOLO: تقسیم تصویر به شبکه و پیشبینی همزمان جعبهها و احتمال کلاسها—عملکرد بلادرنگ.
-
SSD: استفاده از چند نقشه ویژگی در ابعاد مختلف برای شناسایی اشیاء در مقیاسهای گوناگون.
-
۳.۳ بخشبندی معنایی و نمونهای
-
FCN: جایگزینی لایههای تماممتصل با کانولوشن برای خروجی دانهبهدانه.
-
U-Net: ساختار رمزگذار–رمزگشا با اتصالات جانبی برای بخشبندیهای دقیق، بهویژه در تصاویر پزشکی.
-
Mask R-CNN: افزودن شاخهای برای پیشبینی ماسک پیکسلی، کاربرد در بخشبندی نمونهای.
۳.۴ معماریهای نوظهور
-
Vision Transformers (ViT): تصویربرداری به پچها تقسیم شده و با خودتوجه (self‑attention) پردازش میشوند.
-
Graph Neural Networks (GNN): مدلسازی روابط بین اشیاء یا ابرپیکسلها بهصورت گراف.
-
NeRF: بازسازی گرادیانهای نور صحنههای سهبعدی—گرچه در درجه اول سهبعدی است، اما روی نمایهسازی بصری تأثیرگذار است.
۴. تکنیکها و بهبودها
۴.۱ افزایش داده (Data Augmentation)
تغییرات مصنوعی—چرخش، برگرداندن، تغییر رنگ، Cutout، Mixup—برای افزایش تنوع داده و بهبود تعمیم.
۴.۲ یادگیری انتقالی (Transfer Learning)
مدلهای از پیش آموزشدیده (ImageNet، COCO) بهعنوان ستون فقرات؛ فاینتیون روی دادههای حوزه خاص برای تسریع یادگیری و افزایش دقت.
۴.۳ تطبیق دامنه (Domain Adaptation)
کاهش اختلاف بین حوزههای آموزشی و اجرایی با آموزشهای خصمانه یا انتقال سبک برای مقابله با جابهجایی توزیع (نور، دوربین).
۴.۴ قابل توضیح بودن و تصویرسازی
روشهایی مانند Grad‑CAM، حساسیت به انسداد یا نقشههای برجستهسازی (Saliency Maps) نواحی اثرگذار بر پیشبینی را نشان میدهند و اعتماد و رفع اشکال را تسهیل میکنند.
۴.۵ استقرار بلادرنگ و نهفته
-
فشردهسازی مدل: هرس (Pruning)، کوانتیزاسیون، تقطیر دانش برای کاهش حجم و زمان اجرا.
-
شتابدهندههای لبه: استفاده از NPU، FPGA، یا GPU (Jetson، Coral) با موتورهای بهینهشده (TensorRT، OpenVINO) برای نیازهای تأخیر کم.
۵. کاربردهای واقعی
۵.۱ اتوماسیون صنعتی
-
بازرسی کیفیت: تشخیص عیوب سطحی، اندازهگیری ابعاد، تأیید صحت مونتاژ.
-
رباتهای بردار‑و‑بذار: شناسایی موقعیت و جهت قطعات در صحنههای پیچیده برای تولید انعطافپذیر.
۵.۲ رباتیک و سامانههای خودران
-
SLAM بصری: الگوریتمهای ORB‑SLAM، LSD‑SLAM برای نقشهبرداری و برآورد موقعیت.
-
چنگ زدن اشیاء: استفاده از CNN برای یافتن نقطههای مناسب برای چنگ زدن مطمئن.
۵.۳ بهداشت و پزشکی
-
تصویربرداری پزشکی: تحلیل خودکار رادیوگرافی، MRI، اسلایدهای پاتولوژی.
-
کمک جراحی: بخشبندی بلادرنگ اندامها برای راهنمایی در اعمال کمتهاجمی.
۵.۴ خردهفروشی و موجودی
-
خودپرداخت و POS: شناسایی بارکد و اشیاء برای تسریع فرایند پرداخت.
-
پایش قفسه: رباتهای اسکن قفسه برای تشخیص کمبود کالا و برنامهریزی تأمین مجدد.
۵.۵ کشاورزی
-
پایش محصولات: تحلیل تصاویر هوایی برای ارزیابی سلامت گیاه، تشخیص بیماری، برآورد عملکرد.
-
دستهبندی میوهها: درجهبندی بر اساس اندازه، رنگ و عیوب سطحی.
۵.۶ امنیت و نظارت
-
تشخیص چهره: شناسایی افراد یا شناسایی دسترسی غیرمجاز.
-
تحلیل رفتار: شناسایی حرکات غیرمعمول یا خطرناک در فضاهای عمومی.
۶. چالشها و ملاحظات
-
تغییرات نورپردازی
سایهها و انعکاسها عملکرد را کاهش میدهند. پیشپردازش و افزیش داده کمک میکنند اما در محیطهای صنعتی نور کنترلشده ضروری است. -
جابهجایی دامنه
مدلهای آموزشدیده در یک محیط ممکن است در محیط دیگر (مثلاً آزمایشگاه vs کارخانه) ضعیف عمل کنند. تطبیق دامنه و کالیبراسیون مکرر راهحلاند. -
نیاز به داده
تولید مجموعه دادههای باکیفیت و برچسبگذاریشده پرهزینه است. تولید داده مصنوعی و یادگیری فعال هزینه برچسبزنی را کاهش میدهد. -
قیدهای زمان واقعی
کاربردهایی مانند رانندگی خودران نیاز به تأخیر بسیار کم دارند—تعادل بین دقت، سرعت و منابع سختافزاری ضروری است. -
قابل توضیح بودن و اعتماد
مدلهای سیاهباکس نگرانیهای ایمنی و مقرراتی ایجاد میکنند. روشهای قابل توضیح و پروتکلهای اعتبارسنجی دقیق برای حوزههای حیاتی (پزشکی، خودرو) الزامیاند. -
ادغام چندحسی و سهبعدی
ادغام حسگرهای عمق (LiDAR، استریو)، حرارتی یا لمسی میتواند ادراک را بهبود بخشد اما پیچیدگی الگوریتمی را افزایش میدهد.
۷. بهترین شیوهها در طراحی الگوریتمهای بینایی
-
اهداف روشن: قبل از انتخاب الگوریتم، دقت، بازیابی، سرعت و هزینه را تعریف کنید.
-
خطلوله مدولار: تفکیک مراحل دریافت، پیشپردازش، تشخیص و تصمیمگیری برای اشکالزدایی آسانتر.
-
نمونهسازی تکراری: با روشهای کلاسیک شروع کنید و سپس یادگیری عمیق را اضافه نمایید.
-
استراتژی داده قوی: دادههای متنوع جمعآوری کنید، افزیش داده به کار برید و مجموعهداده را دائم بهروز کنید.
-
ارزیابی و پایش: از معیارهای استاندارد (mAP، IoU، F1‑score) استفاده کنید و پس از استقرار عملکرد را نظارت نمایید.
-
همطراحی سختافزار–الگوریتم: پیچیدگی مدل را متناسب با قابلیتهای دستگاه تنظیم کرده و از شتابدهندههای سختافزاری بهره بگیرید.
۸. جهتگیریهای آینده
-
یادگیری خودنظارتی و بدون نظارت
کاهش وابستگی به داده برچسبخورده با بهرهگیری از ساختار دادههای بدون برچسب. -
جستجوی معماری عصبی (NAS)
خودکارسازی طراحی معماریهای شبکه برای تسکهای خاص و محدودیتهای سختافزاری. -
TinyML و مدلهای فوقالعاده کارآمد
گسترش بینایی ماشین در دستگاههای بسیار محدود (میکروکنترلرها) برای کاربردهای IoT. -
یادگیری مداوم و درازمدت
امکان تطبیق با اشیاء، محیطها و وظایف جدید بدون فراموشی فاجعهبار. -
درک یکپارچه سهبعدی
ترکیب بینایی با استدلال فضایی—استنباط شکل اشیاء، چیدمان صحنه و خصوصیات فیزیکی از تصاویر. -
بینایی اخلاقی و عادلانه
کاهش سوگیری در دادهها، تضمین رعایت حریم خصوصی و توسعه مکانیسمهای شفاف حسابرسی.
نتیجهگیری
الگوریتمهای بینایی ماشین از فیلترهای دستی و استخراجکنندههای ساده ویژگی تا سیستمهای عمیق انتها-به-انتها تکامل یافتهاند که در بسیاری از تسکها دقت انسانمانند دارند. با درک تکنیکهای بنیادین، بهکارگیری معماریهای مدرن یادگیری عمیق و پیروی از بهترین روشها، میتوان سیستمهای بینایی قدرتمند در صنایع مختلف—از خطوط تولید و آزمایشگاههای پزشکی تا مزارع کشاورزی و ناوگان خودران—طراحی کرد. با پیشرفت تحقیقات در یادگیری خودنظارتی، کارآمدسازی مدل و درک سهبعدی، نسل بعدی بینایی ماشین قادرتر، تطبیقپذیرتر و همهجاگیرتر خواهد بود.





