ردیابی اشیاء در بینایی ماشین: مفاهیم، روشها و کاربردها

ردیابی اشیاء در بینایی ماشین تکنولوژی محوری است در چشمانداز رو به رشد اتوماسیون، رباتیک، نظارت تصویری و واقعیت افزوده. در حقیقت، ردیابی اشیاء فرایند یافتن و دنبال کردن یک یا چند هدف متحرک در…
ردیابی اشیاء در بینایی ماشین تکنولوژی محوری است در چشمانداز رو به رشد اتوماسیون، رباتیک، نظارت تصویری و واقعیت افزوده. در حقیقت، ردیابی اشیاء فرایند یافتن و دنبال کردن یک یا چند هدف متحرک در گذر زمان با استفاده از دوربین است. با برآورد موقعیت و مسیر حرکتی اهداف در هر فریم، سیستمهای بینایی ماشین میتوانند صحنههای پویا را تحلیل کرده و واکنشهای هوشمند ارائه دهند. از پایش جریان عابران در شهرهای هوشمند تا هدایت بازوهای رباتیک در خطوط تولید، کاربردهای ردیابی اشیاء بسیار متنوع و اثرگذارند.
در این مقاله وبلاگی به بررسی عمیق ردیابی اشیاء در بینایی ماشین میپردازیم؛ مفاهیم پایه، الگوریتمهای کلیدی، پیشرفتهای اخیر، ملاحظات عملی و روندهای آینده را تشریح میکنیم. در پایان، خواننده دید کاملی از چگونگی عملکرد ردیابی، اهمیت آن و نحوه پیادهسازی یا ارزیابی یک سیستم ردیابی برای کاربردهای واقعی خواهد داشت.
۱. مفاهیم و تعاریف پایه
-
تشخیص vs. ردیابی
-
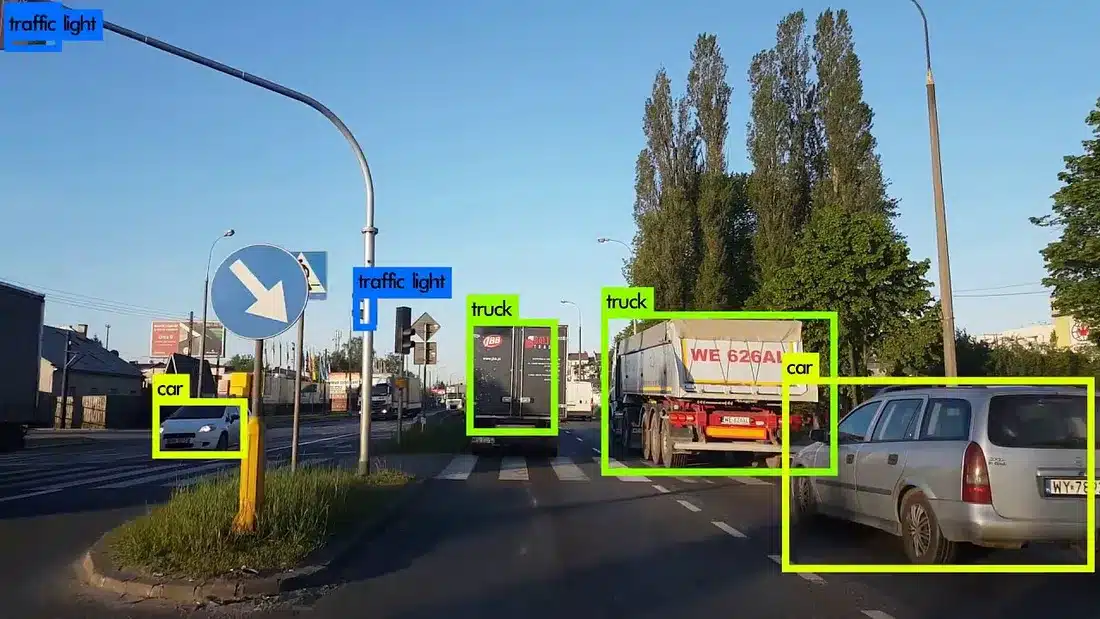
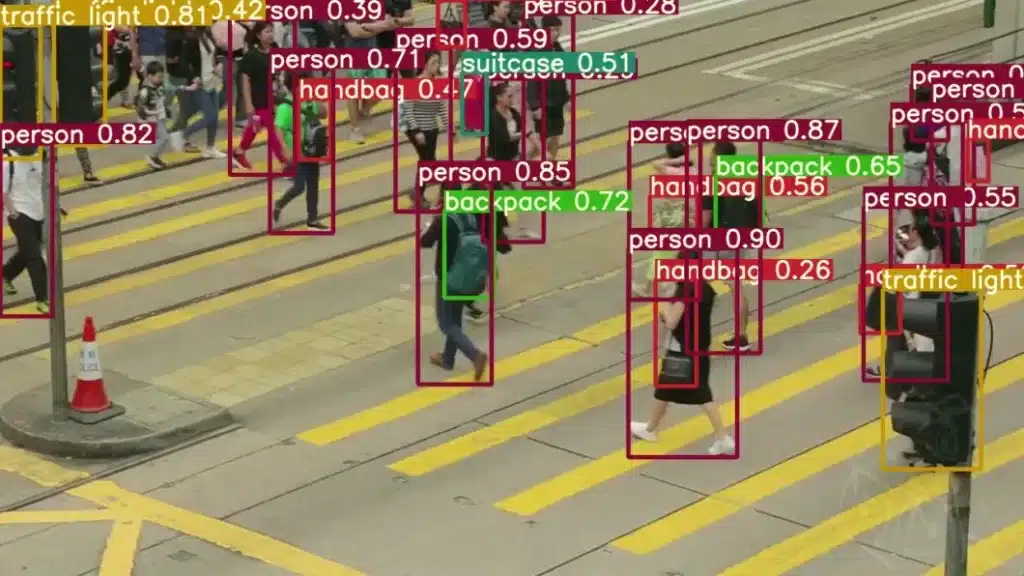
تشخیص اشیاء فرآیند پیدا کردن و مکانیابی نمونههای اشیاء در یک تصویر منفرد است (مثلاً کشیدن جعبه دور خودروها یا افراد).
-
ردیابی اشیاء تشخیص را به توالی فریمها گسترش میدهد و نمونههای شناساییشده را در گذر زمان به هم مرتبط میکند تا مسیرهای مستمر («ردیابی») شکل بگیرد.
-
-
پارادایم Tracking-by-Detection
-
بسیاری از ردیابهای مدرن از یک خط لولهٔ دومرحلهای استفاده میکنند:
-
تشخیص: اجرای یک مدل تشخیص اشیاء (مثل YOLO یا Faster R-CNN) روی هر فریم.
-
ارتباط: تطبیق جعبههای تشخیصی در فریمهای متوالی بر اساس شباهت ظاهری، مجاورت مکانی یا نشانههای حرکتی.
-
-
-
ردیابی آنلاین vs. آفلاین
-
ردیابهای آنلاین فریمها را پشت سر هم پردازش میکنند و در زمان واقعی مسیرها را بهروزرسانی میکنند—ضروری برای خودروهای خودران یا نظارت زنده.
-
ردیابهای آفلاین به کل ویدئو دسترسی دارند و میتوانند مسیرها را به صورت سراسری بهینه کنند—مناسب تحلیل پس از ضبط، ویرایش ویدئو یا آنالیز ورزشی.
-
-
ردیابی تکهدفه vs. چندهدفه
-
ردیابی تکهدفه (SOT) تنها یک هدف را با یک جعبهٔ اولیه دنبال میکند.
-
ردیابی چندهدفه (MOT) چندین هدف را همزمان مدیریت میکند و نیاز به ارتباط دادهای قوی برای حفظ هویتها دارد.
-
۲. چالشهای کلیدی در ردیابی
-
پنهان شدن (اوکلوژن) و بازپدید
-
اشیاء ممکن است موقتاً پشت موانع مخفی شوند و ردیاب هویت یا مسیر آنها را از دست بدهد.
-
روشهای پیشرفته از مدلهای بازشناسی مجدد (ReID) برای تشخیص مجدد پس از اوکلوژن استفاده میکنند.
-
-
تغییرات ظاهری
-
تغییرات نور، مقیاس، زاویه دید یا تغییر شکل، ظاهر هدف را دگرگون میکند.
-
بردارهای ویژگی عمیق (حاصل از شبکههای عصبی) مقاومت بیشتر در برابر این تغییرات را فراهم میکنند.
-
-
حرکت سریع و تاری حرکتی
-
حرکات سریع میتواند فریمها را تار کند یا باعث پرش تشخیصها شود.
-
مدلهای حرکتی (مثل فیلتر کالمن) برای پیشبینی موقعیت احتمالی بین فریمها کمک میکنند.
-
-
شلوغی پسزمینه و حواسپرتیها
-
صحنههای دارای چندین جسم مشابه یا پسزمینهٔ پویان ردیاب را به چالش میکشند.
-
مکانیزمهای توجه (Attention) و تفکیک پسزمینه کمک به جداسازی هدف میکنند.
-
-
محدودیتهای زمان واقعی
-
نرخ فریم بالا و تاخیر کم نیازمند الگوریتمهای کارا و شتابدهی سختافزاری (GPU، FPGA) است.
-
۳. الگوریتمهای کلاسیک
پیش از انقلاب یادگیری عمیق، ردیابی بر روشهای پردازش سیگنال و آمار استوار بود:
-
تطبیق الگو (Template Matching)
-
جستجوی ناحیهای که بیشترین شباهت با قالب (قسمتی از هدف) را دارد.
-
ساده اما حساس به تغییر ظاهر و محاسباتی سنگین برای نواحی جستجوی وسیع.
-
-
Mean Shift و CAMShift
-
استفاده از هیستوگرام رنگ ناحیهٔ هدف.
-
پنجرهٔ جستجو به سمت نقاطی با شباهت بیشتر جابجا میشود.
-
CAMShift اندازه پنجره را برای تغییر مقیاس تنظیم میکند.
-
-
فیلتر کالمن
-
مدلسازی حالت (موقعیت، سرعت) با یک سیستم خطی و نوفه گاوسی.
-
پیشبینی و بهروزرسانی با اندازهگیریهای تشخیصی.
-
کارا و مناسب برای حرکتهای خطی و نرم.
-
-
فیلتر ذرهای (Particle Filter)
-
توزیع پسین حالت با ذرات وزندار نمایش داده میشود.
-
مناسب برای مدلهای حرکت غیرخطی و نوفههای غیرگاوسی.
-
منعطف اما هزینهٔ محاسباتی بالاتر از کالمن.
-
-
فیلترهای همبستگی (MOSSE, KCF)
-
یادگیری فیلتر در حوزه فرکانس که با ظاهر هدف همبستگی بالایی دارد.
-
MOSSE کارایی بلادرنگ ارائه میدهد.
-
KCF با کاربرد هستههای غیرخطی دقت را بهبود میبخشد.
-
۴. ردیابهای مبتنی بر یادگیری عمیق
با ظهور شبکههای عصبی و مجموعههای بزرگ ویدئویی، نسلی نوین از ردیابها ظهور کرد:
۴.۱ ردیابهای شبکه سیامی (Siamese)
-
SiamFC
-
آموزش شبکه سیامی برای یادگیری شباهت بین برش قالب و ناحیه جستجو.
-
نقشه همبستگی محل هدف را نشان میدهد.
-
-
SiamRPN
-
ادغام شبکه پیشنهاد منطقه (RPN) برای رگرسیون جعبههای مرزی و افزایش دقت.
-
-
SiamMask, SiamDW, Ocean
-
واریانتهایی برای پیشبینی ماسک، وزندهی پویا به ویژگیها یا بروزرسانی آنلاین.
-
۴.۲ Tracking-by-Detection با ویژگیهای عمیق
-
DeepSORT
-
ترکیب YOLO (یا هر تشخیصدهنده) با فیلتر کالمن و الگوریتم مجانی برای ارتباط.
-
استفاده از بردارهای ویژگی عمیق برای تطبیق پس از اوکلوژن.
-
-
CenterTrack
-
تشخیص اشیاء و پیشبینی جابجایی ردیابی را در یک شبکه ترکیب میکند.
-
-
Tracktor
-
از سرهای رگرسیون تشخیصدهنده برای پیشبینی جعبه بعدی بدون مدل ردیابی صریح بهره میبرد.
-
۴.۳ ردیابهای تماماً انتها-به-انتها (End-to-End)
-
معماریهای نوین (مثل ترنسفورمرها) امکان آموزش همزمان تشخیص و ردیابی را میدهند:
-
TransTrack, TrackFormer با مکانیزم توجه بین فریمها ارتباط برقرار میکنند.
-
VisTR ردیابی و جداسازی نمونههای ویدئویی را در یک چارچوب یکپارچه انجام میدهد.
-
۵. معیارها و بنچمارکها
برای ارزیابی دقیق ردیابها از دادهها و معیارهای استاندارد استفاده میشود:
-
مجموعه دادهها
-
OTB: توالیهای کوتاه برچسبخورده با ویژگیهای چالشبرانگیز (اوکلوژن، نور)
-
VOT: چالشهای سالانه با ارزیابی بازنشانی در توالیهای متنوع
-
MOT Challenge: صحنههای شلوغ چندهدفه با برچسب هویت
-
UAV123, LaSOT, GOT-10k: ردیابی بلندمدت، نمای پهپاد و تعمیم در مقیاس بزرگ
-
-
معیارهای ردیابی تکهدفه
-
دقت (Precision): درصد فریمهایی که پیشبینی داخل آستانه فاصله از حقیقت زمینی است.
-
موفقیت (Success/IoU): مساحت زیر نمودار اشتراک بر اجتماع جعبههای پیشبینیشده و حقیقی.
-
EAO: دقت و پایداری را با مجازات خرابی ترکیب میکند.
-
-
معیارهای ردیابی چندهدفه
-
MOTA: خطاهای مثبت کاذب، از دسترفتگی اهداف و جابجایی هویت را در نظر میگیرد.
-
MOTP: دقت مکانی اشیاء بهدرستی تطبیقیافته.
-
IDF1: امتیاز F1 روی تطبیق هویتها در فریمها.
-
ID Switches: تعداد دفعات جابجایی هویت.
-
۶. ملاحظات عملی و نکات پیادهسازی
-
انتخاب تشخیصدهنده
-
توازن سرعت و دقت: YOLOv5/v8 برای بلادرنگ؛ Faster R-CNN برای دقت بالاتر.
-
نسخههای سبک برای اجرا روی دستگاههای لبه (Raspberry Pi، Jetson Nano).
-
-
برداشت ویژگی
-
«بدنهای» پیشآموزشدیده (ResNet، EfficientNet) بردارهای ویژگی قوی ارائه میدهند.
-
ریزتنظیم (Fine-tune) روی دادههای خاص حوزه برای مقاومت بیشتر.
-
-
تکنیکهای ارتباط دادهها
-
فقط حرکت: الگوریتم مجانی روی موقعیتهای کالمن پیشبینیشده.
-
فقط ظاهر: فاصله کسینوسی روی بردارهای ویژگی.
-
ترکیبی: ماتریس هزینه حرکت + ظاهر.
-
-
مدیریت اوکلوژن
-
نگهداری مسیرهای «گمشده» برای N فریم قبل از حذف.
-
استفاده از شبکههای بازشناسی مجدد برای بازیابی هویت.
-
-
استقرار بلادرنگ
-
بهینهسازی با TensorRT، OpenVINO یا ONNX Runtime.
-
تنظیم رزولوشن ورودی، اندازه دسته و آستانههای NMS برای عملکرد.
-
-
سناریوهای لبه و توکار
-
بهرهگیری از معماریهای سبک (MobileNet، Tiny-YOLO).
-
در صورت ممکن، پردازشهای سنگین را به ابر واگذار کنید.
-
۷. کاربردهای ردیابی اشیاء
-
خودروهای خودران
-
ردیابی عابران، خودروها و دوچرخهسواران برای پیشبینی مسیر و اجتناب از تصادف.
-
تلفیق با LiDAR و رادار برای اطمینان بیشتر.
-
-
نظارت و امنیت تصویری
-
پایش جریان جمعیت، شناسایی رفتار غیرمعمول و دنبال کردن مظنونین بین دوربینها.
-
ادغام با تشخیص چهره یا پلاک برای شناسایی.
-
-
اتوماسیون صنعتی
-
هدایت بازوهای رباتیک برای برداشتن، قرار دادن یا مونتاژ اجزاء در نوار نقاله.
-
بازرسی محصولات برای نقص با ردیابی ویژگیها.
-
-
آنالیز ورزشی و پخش زنده
-
ردیابی خودکار بازیکنان و توپ برای آمار زنده، تصمیمات آفساید یا گرافیک واقعیت افزوده.
-
تولید نقشه حرارتی بازیکنان و شاخصهای عملکرد.
-
-
واقعیت افزوده (AR) و مجازی (VR)
-
ردیابی اشیاء یا دستها برای قرارگیری دقیق محتوای دیجیتال.
-
ارائه تجربههای markerless AR روی موبایل.
-
-
بهداشت و تصویرسازی پزشکی
-
ردیابی ابزار جراحی در عملهای کمتهاجمی.
-
پایش حرکات بیمار (مثل تحلیل گیت) در توانبخشی.
-
-
خردهفروشی و تحلیل مشتری
-
تحلیل مسیر مشتری در فروشگاه برای بهینهسازی چیدمان.
-
ردیابی تعامل با قفسهها برای تحلیل رفتار.
-
۸. پیشرفتهای اخیر و روندهای پژوهشی
-
ردیابهای مبتنی بر ترنسفورمر
-
استفاده از مکانیزم توجه برای مدلسازی وابستگیهای بلندمدت بین فریمها.
-
بهبود عملکرد در صحنههای شلوغ و اوکلوژن.
-
-
ردیابی بدون ناظر و خودنظارتی
-
کاهش وابستگی به دادههای برچسبخورده از طریق سازگاری زمانی و تقویت داده.
-
-
ردیابی بلندمدت
-
تمرکز بر ماژولهای بازتشخیص برای بازیابی از اوکلوژن طولانی یا خروج از دید.
-
-
ردیابی سهبعدی
-
ترکیب حسگر عمق یا دوربینهای استریو برای ردیابی در فضای سهبعدی، کاربرد در رباتیک و AR.
-
-
ردیابی چنددوربینه
-
حفظ هویت یکسان در دیدهای غیرهمپوشان برای نظارت گسترده.
-
-
ردیابی توضیحپذیر و قابل اعتماد
-
برآورد عدم قطعیت و نمایش توجه برای تفسیر تصمیمات ردیاب—ضروری در کاربردهای ایمنی.
-
۹. راهنمای کلی ساخت یک ردیاب ساده
در ادامه خلاصهای از مراحل اصلی برای پیادهسازی ردیابی چندهدفه با روش Tracking-by-Detection آمده است:
-
انتخاب تشخیصدهنده
-
مدل YOLOv5 پیشآموزشدیده را انتخاب کنید.
-
-
استخراج ویژگی عمیق
-
هر جعبه تشخیص را برش داده و از یک CNN (مثل ResNet50) بردار ویژگی نرمالیزه استخراج کنید.
-
-
ایجاد مسیرها (Tracklets)
-
برای هر تشخیص در فریم اول، یک مسیر جدید با شناسه یکتا، حالت فیلتر کالمن و بردار ویژگی ایجاد کنید.
-
-
پردازش فریم به فریم
-
تشخیص: اجرای YOLO روی فریم جاری.
-
پیشبینی: استمرار فیلتر کالمن برای پیشبینی جعبههای بعدی.
-
ارتباط: محاسبه ماتریس هزینه ترکیبی از فاصله IoU بین جعبههای پیشبینیشده و تشخیصها بهاضافه فاصله کسینوسی بردارهای ویژگی.
-
تخصیص: حل مسئله تخصیص (الگوریتم مجانی) برای انطباق تشخیصها با مسیرها.
-
بهروزرسانی:
-
مسیرهای تطبیقشده: بهروزرسانی کالمن و تازهسازی بردار ویژگی.
-
تشخیصهای بدون انطباق: راهاندازی مسیر جدید.
-
مسیرهای بدون تشخیص: افزایش شمارنده «از دست رفته» و حذف پس از رسیدن به آستانه.
-
-
-
خروجی و نمایش
-
رسم جعبهها و شناسهها روی فریمها.
-
ذخیره مسیرها و محاسبه معیارها در صورت نیاز.
-
۱۰. نتیجهگیری و چشمانداز آینده
ردیابی اشیاء در بینایی ماشین در سالهای اخیر بهواسطه یادگیری عمیق، بنچمارکهای گسترده و سختافزار تخصصی به بلوغ رسیده است. در حالی که روشهای کلاسیک پایههای مهمی در مدلسازی حرکت و تخمین آماری ایجاد کردند، ردیابهای امروزی با یادگیری انتها-به-انتها، مکانیزمهای توجه و تلفیق چندحسی دقت و پایداری بیسابقهای ارائه میدهند.
در آینده نزدیک، چند جهت هیجانانگیز نویدبخش ابتکارات بیشتر هستند:
-
یکپارچهسازی با محاسبات لبه و 5G: واگذاری محاسبات به سرورهای لبه برای ردیابی کمتاخیر در شهرهای هوشمند.
-
تلفیق حسگرهای ترکیبی: ترکیب دوربین RGB، LiDAR، حرارتی و عمق برای افزایش کارایی در شرایط چالشبرانگیز.
-
ردیابی شخصیسازیشده: سازگارسازی آنلاین با محیط یا هدف خاص از طریق متا-یادگیری.
-
حفظ حریم خصوصی و اخلاقی: پردازش در دستگاه، آنونیمسازی و مکانیزمهای حریم خصوصی برای پاسخ به نگرانیهای اجتماعی.
چه در حال توسعه سیستم نظارتی باشید، چه هدایت رباتهای خودران یا خلق تجربههای واقعیت افزوده؛ تسلط بر ردیابی اشیاء در بینایی ماشین گامی اساسی است. با درک مفاهیم پایه، آگاهی از الگوریتمهای مدرن و نقشه راه پیادهسازی، شما آماده هستید تا راهحلهای ردیابی مؤثر و نوآورانهای بسازید که مرزهای ادراک و هوشمندی را فراتر میبرند.





