VisionMaster (HIKROBOT) پلتفرم جامع توسعه و پیادهسازی ماشینویژن صنعتی

در چند سال اخیر، نیاز به اتوماسیون دیداری در خطوط تولید و لجستیک بهسرعت رشد کرده است: بازرسی کیفیت، تعیین موقعیت و هدایت رباتها، خواندن کدها/OCR و اندازهگیریهای دقیق، همه و همه نیازمند یک لایه…
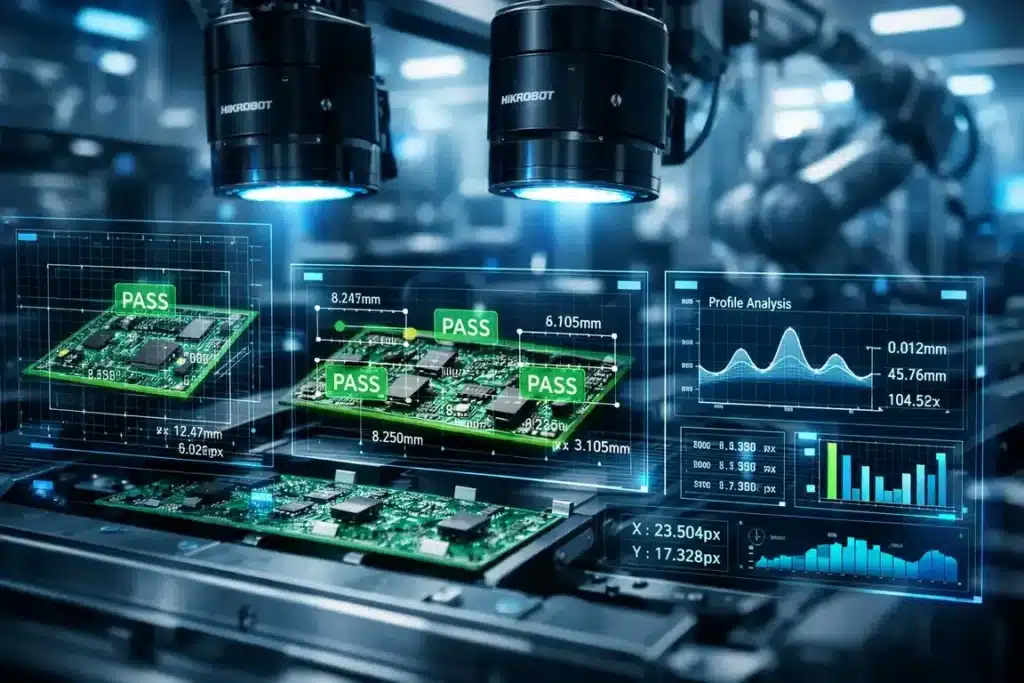
در چند سال اخیر، نیاز به اتوماسیون دیداری در خطوط تولید و لجستیک بهسرعت رشد کرده است: بازرسی کیفیت، تعیین موقعیت و هدایت رباتها، خواندن کدها/OCR و اندازهگیریهای دقیق، همه و همه نیازمند یک لایه نرمافزاری قدرتمند و قابلاعتماد هستند. VisionMaster (توسعهشده توسط HIKROBOT) یک پلتفرم نرمافزاری ماشینویژن است که هدفش فراهم کردن مجموعهای کامل از الگوریتمها و ابزارها برای تسریع توسعه اپلیکیشنهای بینایی ماشین و حل مسألههای بازرسی و موقعیتیابی است. بر اساس اطلاعات رسمی، VisionMaster بیش از 160 ابزار/قابلیت را در اختیار توسعهدهنده میگذارد و برای دقتهای زیرپیکسلی (تا 1/16 پیکسل) بهینه شده است — یعنی مناسب سناریوهایی که دقت موقعیتیابی و اندازهگیری حیاتی است.
بخش اول — خلاصه قابلیتها و فلسفه طراحی
- پلتفرم همهمنظوره الگوریتمی: مجموعهای از ابزارها (الگوریتمها و پردازشهای آماده) برای حل مسائل رایج: تشخیص و شمارش، بازرسی نقص، تطابق قالب (template matching)، تشخیص ویژگیها، OCR، کدخوانی (barcode/QR)، اندازهگیری هندسی و موارد 3D.
- تمرکز روی سرعت توسعه: ابزارها و بلاکهای آماده که معمولا با drag-and-drop یا از طریق اسکریپت امکان چینش را میدهند تا راهاندازی اپلیکیشن سریع شود.
- دقت بالا و زیرپیکسلی: ادعا میشود تا 1/16 پیکسل دقت در مکانیابی امکانپذیر است—مهم برای اندازهگیریها و هدایت رباتیک.
- پشتیبانی از انواع سختافزار: دوربینهای area scan، line scan، دوربینهای 3D، کنترلرهای بینایی و اجزای نورپردازی و لنزها که در اکوسیستم Hikrobot موجودند.
- اکوسیستم: همراه با مستندات، دانلود سنتر، ویدیوهای معرفی و منابع آموزشی (V College و V Community) برای سرعت بخشیدن به آموزش تیمها.
بخش دوم — معماری و اجزای فنی (نگاه مهندسی)
پلتفرمهای مدرن ماشینویژن معمولاً شامل لایههای زیر هستند؛ VisionMaster نیز همین الگو را دنبال میکند:
-
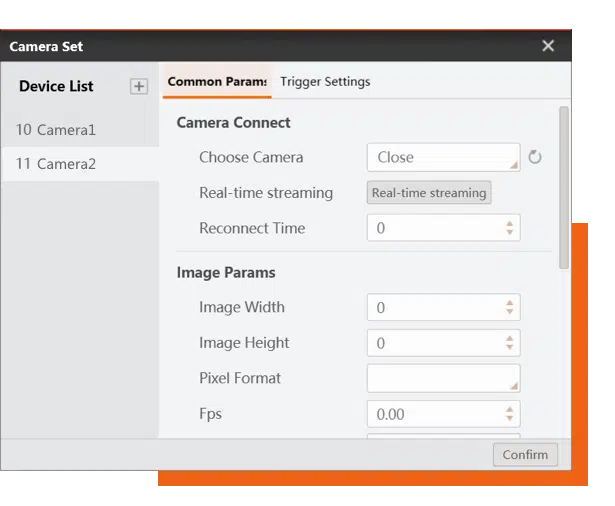
لایه ورود داده (Image Acquisition)
- پشتیبانی از استانداردهای صنعتی (GigE, USB3, CameraLink, CoaXPress و غیره) و دوربینهای خطی/میدی/3D.
- سینک کردن exposure، trigger و کنترل سختافزاری برای ثبات تصویر.
-
لایه پیشپردازش (Pre-processing)
- فیلترهای نویز، نورسنجی، اصلاح توزیع نور، نرمالیزاسیون، تبدیل رنگ/کانالها.
- در این مرحله معمولاً پارامترهای نورپردازی و لنز اهمیت بالایی دارند چون کیفیت تصویر مستقیماً روی دقت الگوریتمها تاثیر میگذارد.
-
بلوکهای الگوریتمی (Algorithm Blocks / Tools)
- تطابق قالب (Template Matching) با پشتیبانی از ثبت زیرپیکسلی.
- آشکارسازی لبه/کانتور، تشخیص blob، فیت خط/دایره، OCR و رمزخوانی.
- ابزارهای بازرسی متداول: آنالیز بافت (texture), defect segmentation, blob analysis.
- ابزارهای اندازهگیری هندسی (فاصله، زاویه، قطر) با تبدیل پیکسلی به واحدهای واقعی پس از کالیبراسیون.
-
کالیبراسیون و تبدیل تصویر به مقیاس واقعی (Calibration & Metric)
- مدل دوربین (پینهول، اعوجاج لنز) و ماتریس کالیبراسیون برای تبدیل نقاط تصویر به مختصات جهانی/کارخانه.
- معمولاً از روشهای معروف مانند چکربورد یا نقاط دایرهای برای کالیبراسیون استفاده میشود.
-
لایه تصمیمگیری و ارتباط (Logic & I/O)
- ترکیب نتایج بینابینی، قوانین بازرسی، آستانهگذاریها و تولید سیگنالهای خروجی (PLC, Ethernet/IP, Profinet, Modbus و …).
- گزارشگیری، نمایش بصری هشدارها و لاگینگ نتیجهها.
-
UI و توسعه (IDE / SDK)
- محیط گرافیکی برای ایجاد گردشکارهای دیداری و احتمالاً SDK برای اتوماسیون و یکپارچهسازی با سیستمهای بالادستی.
- امکانات export برای انتقال پروژه به کنترلرهای Vision یا برای اجرا روی edge devices.
نکته مهندسی: دقتِ زیرپیکسلی
وقتی گفته میشود 1/16 پیکسل، معمولاً منظور روشهایی است که خروجی مکانیابی را با فرمولبندی ریاضی و مدلسازی زیرپیکسلی تخمین میزنند. برای نمونه اگر موقعیت پیکسلی یک الگو را با روشهای همبستگی (cross-correlation) بیابیم و سپس با استفاده از یک برازش درجهدو یا آنالیز منحنی تضعیف (peak fitting) نقطه ماکزیمم را دقیقتر برآورد کنیم، میتوان به زیرپیکسل دست یافت.
اگر بخواهیم تبدیل تصویر به جهان واقعی را نشان دهیم، از مدل ساده پینهول استفاده میکنیم:
- نگاشت پیکسل (u, v) به مختصات دوربین (X_c, Y_c, Z_c) با ماتریس کالیبراسیون K به شکل:
KaTeX:
که در آن K ماتریس داخلی دوربین و R,t پارامترهای چرخش و انتقال بین قابهای مرجع هستند. (این معادله پایهای، نقطه شروع برای اندازهگیریهای متریک است.)
بخش سوم — ابزارهای برجسته و کاربرد آنها
VisionMaster گفته بیش از 160 ابزار ارائه میدهد؛ در اینجا فهرستی از دستههای الگوریتمی و کاربردی که برای اکثر پروژهها اهمیت دارند، با توضیحات قابلاستفاده ارائه میکنم:
-
Template Matching (قالب-یابی)
- کاربرد: یافتن قطعات یا الگوها در تصویر.
- نکته: وقتی از زیرپیکسل پشتیبانی شود، پیدا کردن مرکز دقیق قطعات برای اندازهگیریها یا هدایت ربات حیاتی است.
-
Feature Detection & Description (تشخیص و توصیف ویژگی)
- کاربرد: دنبال کردن نقاط متمایز روی قطعات برای مونتاژ یا تطابق.
- ابزارها: FAST, ORB یا مشابهها در سطح مفهومی؛ پلتفرمها معمولاً نسخههای اختصاصی و بهینه شده را ارائه میدهند.
-
OCR & Code Reading (OCR و خواندن کدها)
- کاربرد: خواندن متن، شماره سریال، تاریخ تولید، بارکد و QR.
- نکته: شرایط نور و زاویه تصویربرداری روی نرخ موفقیت تاثیر شدید دارد؛ پاکسازی تصویر و رکتیفیکاسیون قبل از OCR مهم است.
-
Defect Detection (تشخیص نقص)
- شامل پردازش بافت (texture analysis)، مقایسه با الگوی مرجع، thresholding هوشمند، و segmentation.
- در خطوط تولید با سرعت بالا باید الگوریتمها سبک و real-time باشند.
-
Measurement Tools (اندازهگیری)
- محاسبه فاصلهها، زوایا، قطرها با مبدل پیکسل->میلیمتر پس از کالیبراسیون.
- دقت اندازهگیری به کیفیت تصویر و کالیبراسیون بستگی دارد.
-
3D Vision (بینایی سهبعدی)
- پشتیبانی از دوربینهای 3D یا روشهای استریو/structured light/ToF برای اندازهگیری حجم، تشخیص ارتفاع، و بررسی هندسه سهبعدی.
بخش چهارم — جریان کاری نمونه: از تصویر تا عمل
در ادامه یک گردش کاری نمونه برای پیادهسازی یک بازرسی کیفیت روی یک خط تولید ارائه میدهم.
گام 1 — تعریف مسئله و معیارها
- تعیین کنید چه نوع نقصی میخواهید شناسایی شود (مثلاً خطخوردگی، ترک، ابعاد خارج از محدوده).
- معیارهای پذیرش: اندازهی خطا که باید شناسایی شود (مثلاً ترکهای بالای 0.2 mm).
گام 2 — انتخاب سختافزار و نورپردازی
- انتخاب دوربین: رزولوشن و فریمریت متناسب با اندازه قطعه و سرعت خط.
- نورپردازی: جهت، نوع (بکلایت، حلقهای، موازی)، فیلترها برای افزایش کانتراست.
گام 3 — کالیبراسیون
- استفاده از چکربورد یا target های دایرهای و ذخیره پارامترهای کالیبراسیون در پروژه VisionMaster.
گام 4 — پیشپردازش و آمادهسازی تصویر
- نرمالیزه کردن نور، فیلترهای میانگین/گوسی، اصلاح اعوجاج.
گام 5 — استخراج ویژگیها یا تطابق با الگو
- اگر نقص محلی است: segmentation و thresholding.
- اگر نقص بر مبنای مقایسه با مرجع است: استفاده از template matching یا similarity metrics.
گام 6 — اندازهگیری و قوانین تصمیم
- اندازهگیری هندسی (مثلاً عرض ترک).
- اعمال قوانین آستانه و تصمیمگیری (Pass/Fail).
گام 7 — اتصال به PLC / ثبت لاگ
- خروجی سیگنال، ارسال دادهها به MES و ثبت عکس/نتیجه برای ردگیری.
نمونه کد (پروتوتایپ / شبهکد)
در اینجا یک شبهکد پایتونی که فرآیند را توصیف میکند (تذکر: نام توابع و API فرضی هستند؛ برای اجرای واقعی باید از SDK رسمی VisionMaster استفاده کنید):
# Pseudo-code: using VisionMaster-like SDK (hypothetical)
from visionmaster import VMProject, Camera, TemplateMatch, Calibrator
cam = Camera(device_id='GigE_1', exposure=2000, trigger_mode='hardware')
proj = VMProject('line_inspection.vmproj')
proj.attach_camera(cam)
# Calibration
calib = Calibrator()
calib.load_pattern('checkerboard.img')
K, dist = calib.run()
proj.set_calibration(K, dist)
# Template prepare
template = TemplateMatch('part_template.img', subpixel=True)
proj.add_tool(template)
# Processing loop
for frame in cam.stream():
img = frame.image
img = proj.preprocess(img) # normalize, denoise
result = template.find(img)
if result.found and result.confidence > 0.9:
x, y = result.subpixel_position
measurement = proj.measure(x, y) # compute metric dimension
if measurement.out_of_tolerance:
proj.output_fail_signal()
proj.save_log(img, measurement)
بخش نهم — آینده VisionMaster و روندهای صنعت
ترندهای کلی که روی محصولات مانند VisionMaster تاثیر میگذارند:
- ادغام بیشتر بین classical CV و deep learning: استفاده ترکیبی از الگوریتمهای سریع کلاسیک و مدلهای DL برای پیچیدگیهای کمتر قابلاعتماد.
- اجرای inference در edge (بر روی vision controllers) برای کمینه کردن نیاز به شبکه و کاهش تأخیر.
- خودکارسازی بیشتر در فاز کالیبراسیون و تنظیم پارامترها (Auto-tuning).
- قابلیتهای پیشبینی و تحلیل تجمعی (analytics) برای بهبود نگهداری و افزایش Uptime خط تولید.و توصیه نهایی
VisionMaster از Hikrobot بهعنوان یک پلتفرم ماشینویژن صنعتی، با مجموعهای غنی از ابزارها (بیش از 160 ابزار)، ادعای دقت زیرپیکسلی (تا 1/16 پیکسل) و تمرکز بر توسعه سریع اپلیکیشنهای بینایی مطرح است. اگر پروژه شما نیاز به راهحل صنعتی، یکپارچگی سختافزاری و زمان توسعه کوتاه دارد، VisionMaster گزینهای قوی است. برای پروژههایی که در آنها مدلهای یادگیری عمیق سفارشی بخش اصلی راهکار است، باید بررسی کنید که چطور میتوان این مدلها را در اکوسیستم VisionMaster ادغام کرد یا از چه روشهایی برای تبادل داده استفاده نمود.
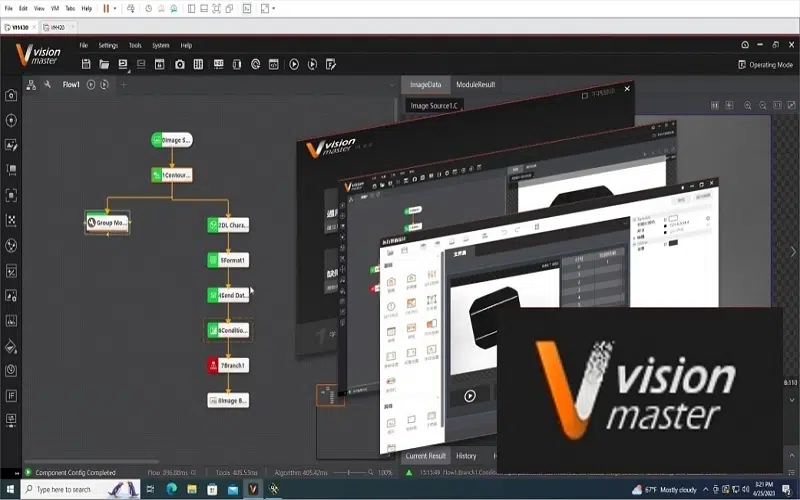
پلتفرم VisionMaster یک نرمافزار جامع و صنعتی برای توسعه سیستمهای ماشینویژن است. تفاوت اصلی آن با کتابخانههای کدنویسی (مثل OpenCV) در رابط کاربری گرافیکی (GUI) و ماژولار بودن آن است. شما نیازی به نوشتن کدهای طولانی ندارید؛ بلکه با کشیدن و رها کردن (Drag-and-Drop) بیش از ۱۶۰ ابزار پردازشی آماده، میتوانید یک جریان کاری (Workflow) پیچیده برای بازرسی، اندازهگیری و خواندن کدها در خطوط تولید بسازید.
خبر خوب این است که خیر! برای انجام اکثر پروژههای استاندارد صنعتی (مثل تشخیص قطعه، اندازهگیری، خواندن بارکد و بررسی نقص)، هیچ نیازی به برنامهنویسی ندارید و رابط گرافیکی نرمافزار کاملاً پاسخگوست. اما اگر یک توسعهدهنده حرفهای هستید و میخواهید نرمافزار را با یک سیستم اتوماسیون خاص یکپارچه کنید، VisionMaster یک SDK (کیت توسعه نرمافزار) قدرتمند برای زبانهایی مانند C# و C++ در اختیار شما قرار میدهد تا کدهای اختصاصی خود را بنویسید.
یکی از درخشانترین ویژگیهای VisionMaster، دقت فوقالعاده آن است. با استفاده از الگوریتمهای پیشرفته ریاضی، این نرمافزار میتواند به دقتهای زیرپیکسلی (Sub-pixel) تا 1/16 پیکسل دست یابد. این یعنی نرمافزار لبهها یا الگوها را بسیار دقیقتر از رزولوشن فیزیکی سنسور دوربین تشخیص میدهد، که برای صنایع حساسی مانند تولید نیمههادیها (Semiconductors) و هدایت بازوهای رباتیک بسیار حیاتی است.
خیر، اصلاً اینطور نیست. اگرچه VisionMaster بهینهسازیهای فوقالعادهای برای سختافزارها و دوربینهای خود شرکت HIKROBOT دارد، اما از استانداردهای جهانی بینایی ماشین مانند GigE Vision و USB3 Vision کاملاً پشتیبانی میکند. این یعنی شما میتوانید از دوربینهای صنعتی برندهای دیگر (مانند Basler، Flir، IDS و…) نیز به راحتی در این پلتفرم استفاده کنید.
بله، به طور کامل! در نسخههای جدید VisionMaster، ابزارهای یادگیری عمیق (Deep Learning) به صورت یکپارچه تعبیه شدهاند. این ابزارها شامل دستهبندی تصویر (Classification)، تشخیص شی (Object Detection)، تقسیمبندی نقصها (Segmentation) و خواندن کاراکترهای پیچیده (DL-OCR) هستند. این قابلیت به شما اجازه میدهد نقصهای پیچیدهای که شکل هندسی مشخصی ندارند (مثل خط و خش روی فلز یا لکههای روی پارچه) را با دقت بالا تشخیص دهید.
ارتباطات صنعتی در این پلتفرم بسیار منعطف طراحی شده است. VisionMaster از طیف وسیعی از پروتکلهای ارتباطی استاندارد پشتیبانی میکند، از جمله:
Profinet
Modbus TCP
Ethernet/IP
ارتباطات سریال (RS232/RS485)
TCP/IP و UDP خام
بنابراین، ارسال مختصات مکانی (X, Y, Angle) به یک ربات یا ارسال سیگنال Pass/Fail به یک PLC به سادگی از طریق تنظیمات شبکهای داخل نرمافزار قابل انجام است.
علاوه بر پردازش تصاویر دو بعدی، VisionMaster یک ماژول بسیار قدرتمند برای پردازش ابر نقاط (Point Cloud) سهبعدی دارد. شما میتوانید دوربینهای پروفایلر لیزری (Laser Profilers) یا دوربینهای سهبعدی استریو را به آن متصل کنید. ابزارهایی برای اندازهگیری حجم، بررسی ارتفاع قطعات، اسکن سطح برای یافتن فرورفتگیها و تطابق سهبعدی (3D Matching) در این نرمافزار گنجانده شده است.
بله، معمارى VisionMaster برای محیطهای بلادرنگ (Real-Time) صنعتی طراحی شده است. این نرمافزار از پردازش چندهستهای (Multi-core CPU) و همچنین شتابدهندههای گرافیکی (GPU Acceleration – به ویژه برای مدلهای یادگیری عمیق) پشتیبانی میکند. در صورت بهینهسازی درستِ جریان کاری و انتخاب سختافزار مناسب، میتواند صدها قطعه در دقیقه را با کمترین تاخیر (Latency) پردازش کند.
معمولاً لایسنس این نرمافزار از طریق یک دانگل سختافزاری (USB Dongle) ارائه میشود. HIKROBOT لایسنسها را به صورت ماژولار به فروش میرساند؛ به این معنی که شما فقط هزینه ابزارهایی را میپردازید که به آنها نیاز دارید (مثلاً لایسنس پایه، لایسنس ابزارهای اندازهگیری، لایسنس یادگیری عمیق و غیره). همچنین، نسخه دمو (بدون نیاز به لایسنس اما با محدودیت در اجرا) برای یادگیری و تست اولیه در دسترس است.
برای شروع، بهترین منبع آکادمی رسمی خود شرکت یعنی V-College است که ویدیوها و مستندات جامعی را ارائه میدهد. همچنین با دانلود نرمافزار، مجموعهای از پروژههای نمونه (Sample Projects) در پوشه نصب قرار میگیرد که شامل تصاویری از پیش ثبت شده است. بررسی این نمونهها و تلاش برای تغییر پارامترهای ابزارها روی این تصاویر آفلاین، سریعترین راه برای درک منطق VisionMaster است.





